Chủ đề khi chuyển động tròn đều thì: Khi chuyển động tròn đều thì các đại lượng như tốc độ dài, tốc độ góc, và gia tốc hướng tâm đóng vai trò quan trọng trong việc phân tích và áp dụng thực tiễn. Bài viết này giúp bạn nắm vững các khái niệm và ứng dụng của chuyển động tròn đều một cách dễ hiểu và chi tiết.
Mục lục
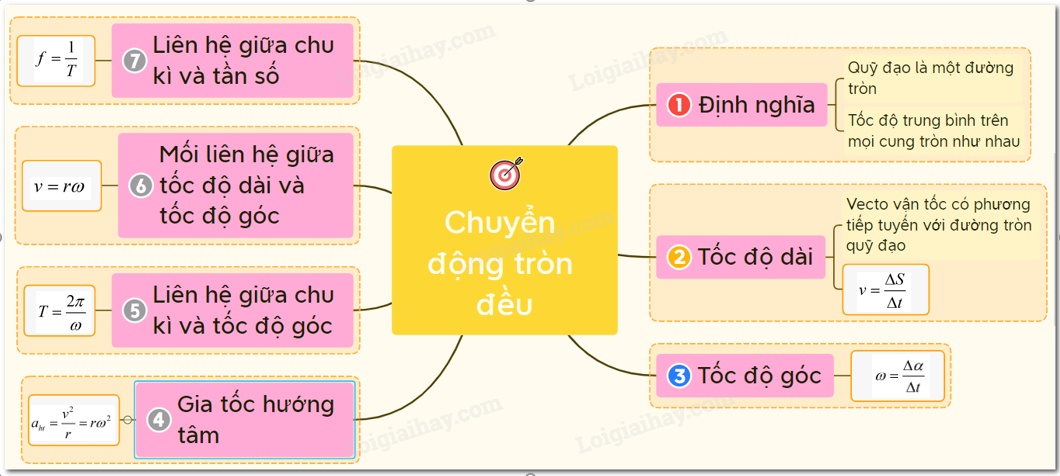
Chuyển động tròn đều và các khái niệm liên quan
Chuyển động tròn đều là chuyển động của một vật theo quỹ đạo tròn với tốc độ dài không đổi. Trong quá trình này, có một số khái niệm và công thức quan trọng mà chúng ta cần lưu ý:
1. Tốc độ dài \( v \)
Tốc độ dài của chuyển động tròn đều được xác định bằng:
Trong đó:
- \(\Delta s\): Độ dài cung tròn mà vật đi được
- \(t\): Thời gian để vật di chuyển được cung tròn đó
2. Tốc độ góc \( \omega \)
Tốc độ góc của chuyển động tròn đều là đại lượng đo bằng góc mà bán kính quỹ đạo quét được trong một đơn vị thời gian:
Trong đó:
- \(\Delta \varphi\): Góc mà vật quét được (rad)
- \(t\): Thời gian để quét được góc \(\Delta \varphi\) (s)
Liên hệ giữa tốc độ dài và tốc độ góc là:
Trong đó, \(r\) là bán kính quỹ đạo tròn.
3. Chu kỳ \( T \) và tần số \( f \)
Chu kỳ \( T \) là thời gian để vật thực hiện được một vòng chuyển động:
Tần số \( f \) là số vòng mà vật đi được trong một giây:
Đơn vị của tần số là Hertz (Hz).
4. Gia tốc hướng tâm \( a_{ht} \)
Gia tốc hướng tâm là gia tốc của vật khi chuyển động theo quỹ đạo tròn, luôn hướng vào tâm của quỹ đạo:
Trong đó:
- \(v\): Tốc độ dài (m/s)
- \(r\): Bán kính quỹ đạo (m)
- \(\omega\): Tốc độ góc (rad/s)
Gia tốc hướng tâm chứng minh rằng gia tốc không chỉ đặc trưng cho sự thay đổi của vận tốc về độ lớn mà còn về phương và chiều của vận tốc.

Tổng quan về chuyển động tròn đều
Chuyển động tròn đều là một loại chuyển động mà một vật di chuyển trên một quỹ đạo hình tròn với tốc độ dài không đổi. Để hiểu rõ hơn về chuyển động tròn đều, chúng ta cần làm rõ một số khái niệm cơ bản như sau:
- Quỹ đạo: Đường đi của vật khi chuyển động tròn đều là một đường tròn với bán kính cố định \( r \).
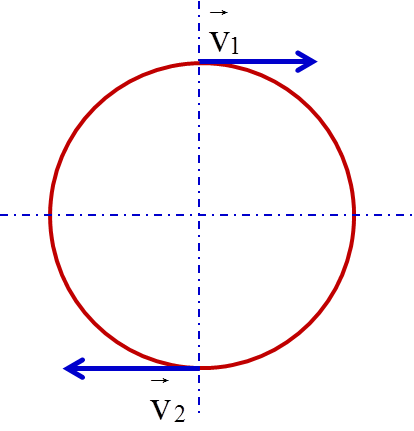
- Tốc độ dài: Tốc độ mà vật di chuyển dọc theo quỹ đạo tròn, ký hiệu là \( v \), và không thay đổi trong suốt quá trình chuyển động.
- Tốc độ góc: Tốc độ biến đổi của góc mà bán kính quét được trong một đơn vị thời gian, ký hiệu là \( \omega \), và được tính bằng công thức: \[ \omega = \frac{v}{r} \]
- Chu kỳ \( T \): Thời gian để vật thực hiện một vòng tròn hoàn chỉnh, được tính bằng: \[ T = \frac{2\pi r}{v} \]
- Gia tốc hướng tâm: Gia tốc của vật luôn hướng vào tâm của quỹ đạo tròn, giữ cho vật di chuyển trên đường tròn và có giá trị là: \[ a_{ht} = \frac{v^2}{r} = r \times \omega^2 \]
Trong chuyển động tròn đều, các đại lượng như tốc độ dài, tốc độ góc, và gia tốc hướng tâm không chỉ giúp mô tả chuyển động của vật mà còn là cơ sở để giải quyết nhiều bài toán liên quan đến chuyển động quay, từ các ứng dụng trong đời sống hàng ngày đến những hiện tượng trong vũ trụ.
Các đại lượng vật lý liên quan đến chuyển động tròn đều
Trong chuyển động tròn đều, có nhiều đại lượng vật lý quan trọng liên quan đến việc mô tả và phân tích chuyển động này. Dưới đây là các đại lượng chính:
- Tốc độ dài \( v \): Tốc độ di chuyển của vật dọc theo quỹ đạo tròn, được tính bằng công thức: \[ v = \frac{s}{t} = r \times \omega \]
- Tốc độ góc \( \omega \): Tốc độ biến đổi góc mà bán kính quét được trong một đơn vị thời gian: \[ \omega = \frac{\Delta \theta}{\Delta t} \]
- Chu kỳ \( T \): Thời gian cần thiết để vật thực hiện một vòng tròn hoàn chỉnh, tính bằng: \[ T = \frac{2\pi}{\omega} = \frac{2\pi r}{v} \]
- Tần số \( f \): Số vòng quay mà vật thực hiện được trong một đơn vị thời gian: \[ f = \frac{1}{T} = \frac{\omega}{2\pi} \]
- Gia tốc hướng tâm \( a_{ht} \): Gia tốc của vật luôn hướng vào tâm của quỹ đạo tròn, giữ cho vật di chuyển trên đường tròn: \[ a_{ht} = \frac{v^2}{r} = r \times \omega^2 \]
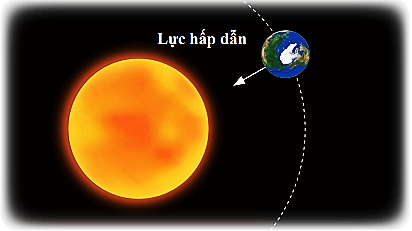
- Lực hướng tâm \( F_{ht} \): Lực tác dụng làm vật chuyển động theo quỹ đạo tròn, hướng về phía tâm quỹ đạo: \[ F_{ht} = m \times a_{ht} = \frac{m \times v^2}{r} = m \times r \times \omega^2 \]
Trong đó, \( s \) là quãng đường mà vật đi được, \( t \) là thời gian và \( r \) là bán kính quỹ đạo.
Trong đó, \( \Delta \theta \) là góc quét được trong thời gian \( \Delta t \).
Những đại lượng này không chỉ giúp mô tả đầy đủ chuyển động tròn đều mà còn là nền tảng để giải các bài toán liên quan đến động lực học và cơ học trong nhiều ứng dụng thực tế.

Ứng dụng của chuyển động tròn đều trong thực tế
Chuyển động tròn đều là một hiện tượng vật lý phổ biến trong tự nhiên và kỹ thuật, với nhiều ứng dụng quan trọng trong đời sống và công nghiệp. Dưới đây là một số ứng dụng cụ thể của chuyển động tròn đều:
- Vệ tinh nhân tạo: Các vệ tinh quay quanh Trái Đất theo quỹ đạo tròn đều, giúp duy trì vị trí ổn định để cung cấp dịch vụ viễn thông, GPS và nghiên cứu khoa học.
- Máy phát điện: Trong các nhà máy phát điện, chuyển động quay của rotor trong từ trường được sử dụng để tạo ra dòng điện xoay chiều, dựa trên nguyên lý chuyển động tròn đều.
- Bánh xe: Chuyển động tròn đều của bánh xe là cơ sở cho hoạt động của nhiều loại phương tiện giao thông như ô tô, xe đạp, và tàu hỏa, giúp di chuyển ổn định và tiết kiệm năng lượng.
- Thiết bị quay ly tâm: Các máy ly tâm trong phòng thí nghiệm hoặc công nghiệp sử dụng chuyển động tròn đều để tách các thành phần của hỗn hợp dựa trên khối lượng riêng.
- Vòng quay đồng hồ: Cơ chế hoạt động của đồng hồ dựa trên chuyển động tròn đều của các bánh răng, đảm bảo tính chính xác và đồng nhất của thời gian đo được.
Các ứng dụng này không chỉ minh họa tầm quan trọng của chuyển động tròn đều trong việc duy trì hoạt động của các thiết bị và hệ thống mà còn cho thấy sự liên kết mật thiết giữa lý thuyết vật lý và thực tiễn đời sống.

Ví dụ và bài tập vận dụng chuyển động tròn đều
Chuyển động tròn đều là một khái niệm quan trọng trong vật lý, và để hiểu rõ hơn về nó, chúng ta cần xem xét một số ví dụ và bài tập cụ thể. Dưới đây là các ví dụ minh họa và bài tập giúp củng cố kiến thức về chuyển động tròn đều:
Ví dụ 1: Tính vận tốc góc của một vật
Một vật thể quay đều trên một đường tròn với bán kính \(r = 5\) m và hoàn thành một vòng quay trong thời gian \(T = 10\) giây. Tính vận tốc góc \(\omega\) của vật.
Giải:
- Vận tốc góc được tính theo công thức: \(\omega = \frac{2\pi}{T}\)
- Thay giá trị \(T = 10\) giây vào công thức, ta có: \(\omega = \frac{2\pi}{10} = \frac{\pi}{5}\) rad/s
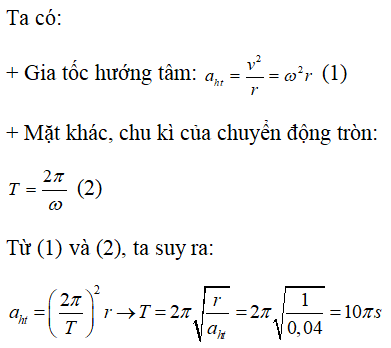
Ví dụ 2: Tính gia tốc hướng tâm
Một vật thể quay tròn đều với bán kính \(r = 2\) m và vận tốc tuyến tính \(v = 4\) m/s. Tính gia tốc hướng tâm \(a_h\) của vật.
Giải:
- Gia tốc hướng tâm được tính theo công thức: \[a_h = \frac{v^2}{r}\]
- Thay các giá trị \(v = 4\) m/s và \(r = 2\) m vào công thức, ta có: \[a_h = \frac{4^2}{2} = \frac{16}{2} = 8\] m/s²
Bài tập vận dụng
- Một chiếc xe đua chạy quanh một đường đua hình tròn có bán kính 100 m với vận tốc không đổi 20 m/s. Tính vận tốc góc của xe và gia tốc hướng tâm tác động lên xe.
- Một hành tinh quay quanh Mặt Trời trên một quỹ đạo gần như tròn đều với bán kính quỹ đạo 1,5 x 10^11 m và thời gian một vòng quỹ đạo là 365 ngày. Tính vận tốc góc và vận tốc tuyến tính của hành tinh này.
- Một bánh xe có đường kính 1 m quay với vận tốc góc 2 rad/s. Tính vận tốc tuyến tính của một điểm trên rìa bánh xe.
Các ví dụ và bài tập trên giúp làm rõ các khái niệm cơ bản về chuyển động tròn đều và ứng dụng của nó trong thực tế.