Chủ đề viết phương trình chuyển động: Trong bài viết này, chúng ta sẽ tìm hiểu cách viết phương trình chuyển động một cách chi tiết và dễ hiểu. Bài viết cung cấp các ví dụ thực tế và bài tập ứng dụng, giúp bạn nắm vững kiến thức cơ bản và nâng cao về chuyển động trong vật lý. Cùng khám phá nhé!
Mục lục
Viết Phương Trình Chuyển Động
Phương trình chuyển động là một công cụ quan trọng trong vật lý, giúp mô tả sự di chuyển của một vật thể theo thời gian. Dưới đây là các khái niệm và phương trình cơ bản liên quan đến chuyển động.
1. Chuyển Động Thẳng Đều
Chuyển động thẳng đều là dạng chuyển động trong đó một vật di chuyển theo một đường thẳng với vận tốc không đổi. Phương trình tọa độ của chuyển động thẳng đều được mô tả như sau:
\[
x = x_0 + v \cdot (t - t_0)
\]
- \(x\): Tọa độ của vật tại thời điểm \(t\)
- \(x_0\): Tọa độ ban đầu của vật tại thời điểm \(t_0\)
- \(v\): Vận tốc của vật (không đổi)
- \(t\): Thời gian
- \(t_0\): Mốc thời gian ban đầu
2. Chuyển Động Thẳng Biến Đổi Đều
Chuyển động thẳng biến đổi đều là chuyển động trong đó vận tốc của vật thay đổi đều theo thời gian. Phương trình vận tốc và phương trình chuyển động của dạng này được biểu diễn như sau:
\[
v = v_0 + a \cdot t
\]
\[
x = x_0 + v_0 \cdot t + \frac{1}{2} a \cdot t^2
\]
- \(v_0\): Vận tốc ban đầu
- \(a\): Gia tốc (hằng số)
- Các ký hiệu khác giống như ở phần chuyển động thẳng đều.
3. Xác Định Quãng Đường và Thời Gian
Trong các bài toán vật lý, quãng đường \(s\) mà vật đi được và thời gian \(t\) thường là hai đại lượng cần xác định. Dưới đây là một số công thức cơ bản:
- Quãng đường trong chuyển động thẳng đều: \[s = v \cdot t\]
- Thời gian chuyển động: \[t = \frac{s}{v}\]
4. Bài Tập Ví Dụ
Để hiểu rõ hơn, hãy xem xét một ví dụ đơn giản về tính quãng đường và vận tốc:
Giả sử một xe máy đi từ điểm A đến điểm B với vận tốc \(v = 60 \, \text{km/h}\). Nếu thời gian di chuyển là \(t = 2 \, \text{giờ}\), quãng đường mà xe đi được là:
\[
s = 60 \, \text{km/h} \times 2 \, \text{giờ} = 120 \, \text{km}
\]
5. Đồ Thị Chuyển Động
Đồ thị chuyển động thẳng đều là một đường thẳng, trong đó trục hoành (x) biểu diễn thời gian và trục tung (y) biểu diễn tọa độ hoặc vận tốc. Độ dốc của đồ thị trong trường hợp này tương đương với vận tốc của vật.
Trên đây là các khái niệm và phương trình cơ bản về chuyển động thẳng. Những kiến thức này rất quan trọng trong việc hiểu rõ cách thức vận hành của các đối tượng trong vật lý và ứng dụng vào thực tế.

1. Khái Niệm Cơ Bản Về Phương Trình Chuyển Động
Phương trình chuyển động là một công cụ toán học giúp mô tả vị trí của một vật theo thời gian. Để hiểu rõ hơn về phương trình này, cần nắm vững các khái niệm cơ bản sau:
- Chuyển động: Là sự thay đổi vị trí của một vật so với một mốc tọa độ nhất định theo thời gian.
- Hệ tọa độ: Là hệ thống gồm các trục (thường là trục x, y, z) được sử dụng để xác định vị trí của vật.
- Thời gian \(t\): Là biến số thể hiện sự biến đổi theo thời gian của vị trí vật.
- Vận tốc \(v\): Là đại lượng mô tả tốc độ và hướng chuyển động của vật, được xác định bởi độ biến thiên của vị trí theo thời gian.
- Gia tốc \(a\): Là đại lượng mô tả sự thay đổi vận tốc theo thời gian.
Phương trình chuyển động có thể được biểu diễn dưới dạng tổng quát:
\[
x = x_0 + v \cdot t + \frac{1}{2} a \cdot t^2
\]
Trong đó:
- \(x\): Vị trí của vật tại thời điểm \(t\)
- \(x_0\): Vị trí ban đầu của vật tại thời điểm \(t_0\)
- \(v\): Vận tốc ban đầu của vật
- \(a\): Gia tốc của vật
- \(t\): Thời gian từ khi vật bắt đầu chuyển động
Các phương trình này được sử dụng để giải quyết các bài toán liên quan đến chuyển động của vật thể trong không gian và thời gian.
2. Chuyển Động Thẳng Đều
Chuyển động thẳng đều là một dạng chuyển động đơn giản trong đó vật di chuyển trên một đường thẳng với vận tốc không đổi. Dưới đây là các khái niệm và phương trình cơ bản liên quan đến chuyển động thẳng đều:
- Vận tốc không đổi \(v\): Trong chuyển động thẳng đều, vận tốc của vật không thay đổi theo thời gian. Điều này có nghĩa là gia tốc của vật bằng 0, tức là:
- Phương trình tọa độ: Phương trình xác định vị trí của vật tại một thời điểm bất kỳ \(t\) trong chuyển động thẳng đều có dạng:
- \(x\): Vị trí của vật tại thời điểm \(t\).
- \(x_0\): Vị trí ban đầu của vật tại thời điểm \(t = 0\).
- \(v\): Vận tốc của vật (không đổi).
- \(t\): Thời gian đã trôi qua kể từ thời điểm bắt đầu.
- Đồ thị tọa độ - thời gian: Đồ thị mô tả mối quan hệ giữa tọa độ và thời gian trong chuyển động thẳng đều là một đường thẳng có độ dốc bằng vận tốc \(v\). Độ dốc này thể hiện sự thay đổi vị trí theo thời gian.
\[
a = 0
\]
\[
x = x_0 + v \cdot t
\]
Dưới đây là bảng tóm tắt các thông số quan trọng trong chuyển động thẳng đều:
| Thông số | Ký hiệu | Công thức |
| Vị trí | \(x\) | \(x = x_0 + v \cdot t\) |
| Vận tốc | \(v\) | Không đổi |
| Gia tốc | \(a\) | \(a = 0\) |
Chuyển động thẳng đều là một phần cơ bản trong các bài học về vật lý, giúp người học hiểu rõ hơn về cách các vật thể di chuyển khi không có lực tác động làm thay đổi vận tốc của chúng.

3. Chuyển Động Thẳng Biến Đổi Đều
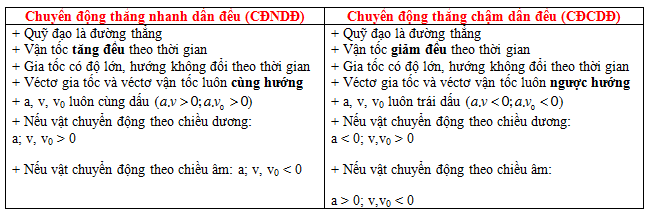
Chuyển động thẳng biến đổi đều là loại chuyển động trong đó vận tốc của vật thay đổi đều theo thời gian, tức là gia tốc của vật là hằng số. Điều này có nghĩa rằng sự thay đổi vận tốc trong các khoảng thời gian bằng nhau luôn giống nhau. Chuyển động này bao gồm hai trường hợp:
- Chuyển động thẳng nhanh dần đều: Vận tốc của vật tăng dần theo thời gian, gia tốc cùng chiều với vận tốc.
- Chuyển động thẳng chậm dần đều: Vận tốc của vật giảm dần theo thời gian, gia tốc ngược chiều với vận tốc.
Phương trình chuyển động của vật trong chuyển động thẳng biến đổi đều có dạng:
\[ x = x_0 + v_0 t + \frac{1}{2} a t^2 \]
Trong đó:
- x: Tọa độ của vật tại thời điểm \(t\).
- x_0: Tọa độ ban đầu của vật.
- v_0: Vận tốc ban đầu của vật.
- a: Gia tốc của vật (hằng số).
- t: Thời gian tính từ thời điểm ban đầu.
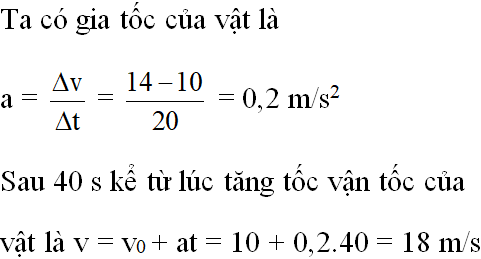
Ngoài ra, ta cũng có phương trình vận tốc:
\[ v = v_0 + at \]
Để xác định quãng đường đi được của vật trong chuyển động thẳng biến đổi đều, có thể sử dụng công thức:
\[ s = v_0 t + \frac{1}{2} a t^2 \]
Với các công thức trên, ta có thể phân tích và giải các bài toán liên quan đến chuyển động thẳng biến đổi đều, xác định các yếu tố như vị trí, vận tốc, gia tốc, và quãng đường.

4. Chuyển Động Tròn Đều
Chuyển động tròn đều là chuyển động của một vật theo đường tròn với tốc độ góc không đổi. Đây là một trong những dạng chuyển động cơ bản trong cơ học, có nhiều ứng dụng trong cả đời sống và kỹ thuật.
4.1 Định nghĩa và phương trình
Trong chuyển động tròn đều, tốc độ góc \(\omega\) là một hằng số và phương trình chuyển động được biểu diễn dưới dạng:
\[
\theta = \theta_0 + \omega t
\]
Trong đó:
- \(\theta\) là góc quay (radian) tại thời điểm \(t\).
- \(\theta_0\) là góc ban đầu (radian) tại thời điểm \(t = 0\).
- \(\omega\) là tốc độ góc (rad/s), là hằng số.
- \(t\) là thời gian chuyển động (giây).
4.2 Ứng dụng trong đời sống
Chuyển động tròn đều xuất hiện ở rất nhiều nơi trong cuộc sống hàng ngày:
- Đồng hồ: Kim đồng hồ chuyển động tròn đều quanh trục để chỉ thời gian.
- Bánh xe: Bánh xe đạp, ô tô chuyển động tròn đều khi xe di chuyển.
- Quạt điện: Cánh quạt quay tròn đều để tạo ra luồng gió.
4.3 Bài tập ứng dụng
Dưới đây là một số bài tập giúp bạn rèn luyện và hiểu rõ hơn về chuyển động tròn đều:
- Tính thời gian cần thiết để một điểm trên bánh xe quay tròn đều thực hiện được 5 vòng quay nếu tốc độ góc của bánh xe là \( \omega = 2\ \text{rad/s}\).
- Một kim đồng hồ có tốc độ góc \( \omega = \frac{\pi}{30}\ \text{rad/s}\). Tính góc quay của kim sau 15 phút.
- Một cánh quạt quay tròn đều với tốc độ góc \( \omega = 10\ \text{rad/s}\). Tính số vòng quay của cánh quạt sau 1 phút.

6. Các Lỗi Thường Gặp Khi Viết Phương Trình Chuyển Động
Khi viết phương trình chuyển động, học sinh thường gặp phải một số lỗi phổ biến. Những lỗi này có thể gây ảnh hưởng đến độ chính xác của các phép tính cũng như kết quả cuối cùng. Dưới đây là một số lỗi thường gặp và cách khắc phục:
- Xác định sai hệ quy chiếu:
Một trong những lỗi phổ biến là học sinh không xác định đúng hệ quy chiếu khi viết phương trình chuyển động. Điều này dẫn đến việc sử dụng sai các tọa độ và thời gian trong các phép tính. Để khắc phục, cần đảm bảo rằng bạn luôn chọn hệ quy chiếu thích hợp và thống nhất trong suốt quá trình giải bài.
- Sai sót trong việc xác định vận tốc và tọa độ ban đầu:
Học sinh thường nhầm lẫn khi xác định vận tốc và tọa độ ban đầu của vật. Ví dụ, không ít trường hợp, tọa độ ban đầu được đặt không đúng tại gốc tọa độ hoặc vận tốc ban đầu bị tính sai. Cách khắc phục là luôn kiểm tra kỹ lưỡng các giá trị ban đầu trước khi đưa vào phương trình.
- Lỗi trong việc sử dụng công thức:
Khi áp dụng các công thức như \( x = x_0 + v t \) hoặc \[ x = x_0 + v_0 t + \frac{1}{2} a t^2 \], nhiều học sinh gặp khó khăn trong việc xác định đúng các biến số và hằng số. Lỗi này thường xảy ra khi các đơn vị không đồng nhất hoặc khi các biến chưa được chuyển đổi đúng cách. Để tránh lỗi này, học sinh cần nắm vững công thức và thực hiện các bước chuyển đổi đơn vị một cách chính xác.
- Nhầm lẫn trong việc xét chiều chuyển động:
Chiều dương và chiều âm của chuyển động là yếu tố quan trọng trong việc viết phương trình. Nếu xác định sai chiều, toàn bộ phương trình có thể bị sai. Ví dụ, khi xét chuyển động ngược chiều, dấu của vận tốc phải được thay đổi phù hợp. Khắc phục lỗi này bằng cách phân tích kỹ lưỡng chiều chuyển động trước khi viết phương trình.
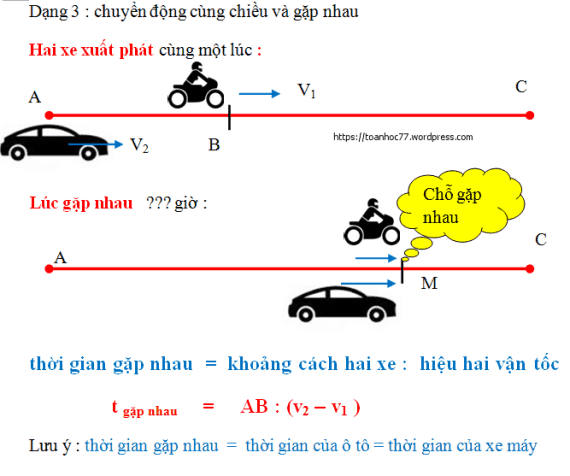
- Lỗi khi kết hợp nhiều phương trình chuyển động:
Khi giải các bài toán phức tạp có nhiều vật thể chuyển động cùng một lúc, học sinh thường gặp khó khăn trong việc kết hợp các phương trình chuyển động. Việc không đồng bộ hóa thời gian, tọa độ hay các biến số khác giữa các phương trình có thể dẫn đến kết quả sai. Để tránh điều này, hãy viết rõ ràng từng phương trình và sử dụng các điều kiện biên phù hợp để kết hợp chúng.
Việc nhận biết và khắc phục những lỗi này sẽ giúp học sinh viết chính xác hơn các phương trình chuyển động, đồng thời hiểu sâu hơn về bản chất của các bài toán vật lý liên quan.
XEM THÊM:
7. Ứng Dụng Của Phương Trình Chuyển Động Trong Thực Tiễn
Phương trình chuyển động không chỉ là một công cụ toán học quan trọng trong vật lý mà còn có nhiều ứng dụng thực tiễn trong cuộc sống. Dưới đây là một số ví dụ về cách phương trình chuyển động được áp dụng trong các lĩnh vực khác nhau:
- Ứng dụng trong kỹ thuật giao thông: Phương trình chuyển động giúp tính toán quãng đường, vận tốc và thời gian di chuyển của các phương tiện giao thông. Điều này cực kỳ quan trọng trong việc thiết kế hệ thống đèn giao thông, lên lịch trình cho các tuyến xe buýt, và tối ưu hóa hiệu suất hoạt động của các phương tiện.
- Ứng dụng trong hàng không và không gian: Trong ngành hàng không, phương trình chuyển động được sử dụng để tính toán lộ trình bay, tối ưu hóa quỹ đạo và xác định vị trí của máy bay trong không gian. Đối với các chuyến bay không gian, phương trình này giúp xác định chính xác quỹ đạo của tàu vũ trụ và các vệ tinh.
- Ứng dụng trong thể thao: Trong thể thao, đặc biệt là các môn như bóng đá, bóng rổ, và điền kinh, phương trình chuyển động giúp phân tích và cải thiện kỹ thuật của vận động viên. Ví dụ, nó có thể được sử dụng để tối ưu hóa góc ném bóng hoặc tính toán quãng đường và thời gian chạy của vận động viên.
- Ứng dụng trong quản lý sản xuất: Phương trình chuyển động cũng có vai trò quan trọng trong việc tối ưu hóa dây chuyền sản xuất. Nó giúp tính toán và điều chỉnh tốc độ hoạt động của máy móc, đảm bảo quy trình sản xuất diễn ra một cách hiệu quả và đồng bộ.
- Ứng dụng trong nghiên cứu và phát triển: Trong các lĩnh vực nghiên cứu như vật lý và cơ học, phương trình chuyển động là công cụ không thể thiếu để mô phỏng và phân tích các hiện tượng tự nhiên. Chúng giúp các nhà khoa học hiểu rõ hơn về các quy luật của tự nhiên và phát triển những công nghệ mới.
Như vậy, phương trình chuyển động không chỉ là một lý thuyết học thuật mà còn có nhiều ứng dụng quan trọng trong thực tiễn, từ việc đảm bảo an toàn giao thông đến cải tiến các phương pháp sản xuất và nghiên cứu khoa học.