Chủ đề encoder in digital electronics: Encoder in Digital Electronics là một chủ đề quan trọng trong lĩnh vực điện tử kỹ thuật số, giúp chuyển đổi các tín hiệu cơ học thành tín hiệu điện tử. Bài viết này sẽ khám phá cấu tạo, nguyên lý hoạt động, các loại encoder phổ biến và ứng dụng thực tiễn của chúng trong các hệ thống điều khiển và đo lường, giúp bạn hiểu rõ hơn về tầm quan trọng của công nghệ này.
Mục lục
- Encoder trong Điện Tử Kỹ Thuật Số
- Tổng Quan Về Encoder
- Cấu Tạo và Nguyên Lý Hoạt Động
- Lựa Chọn và Lắp Đặt Encoder
- Các Ứng Dụng Thực Tế của Encoder
- Xu Hướng Phát Triển của Công Nghệ Encoder
- 10 Dạng Bài Tập Về Encoder trong Điện Tử Kỹ Thuật Số
- Dạng 1: Tính toán số xung tín hiệu từ Encoder
- Dạng 2: Xác định vị trí và tốc độ động cơ dựa trên tín hiệu Encoder
- Dạng 3: Phân tích lỗi tín hiệu trong hệ thống sử dụng Encoder
- Dạng 4: Thiết kế mạch điện sử dụng Encoder để điều khiển động cơ
- Dạng 5: Tính toán độ phân giải của Encoder
- Dạng 6: Ứng dụng Encoder trong hệ thống đo lường tốc độ
- Dạng 7: Lập trình điều khiển động cơ sử dụng tín hiệu Encoder
- Dạng 8: Thiết kế và mô phỏng hệ thống băng tải sử dụng Encoder
- Dạng 9: Phân tích hiệu suất của hệ thống điều khiển sử dụng Encoder
- Dạng 10: Đo lường và điều khiển vị trí robot sử dụng Encoder
Encoder trong Điện Tử Kỹ Thuật Số
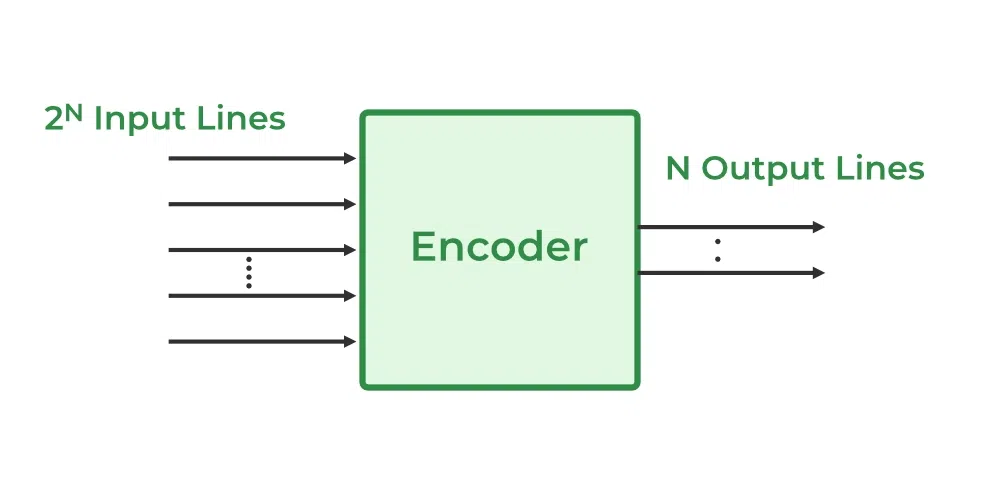
Encoder, hay còn gọi là bộ mã hóa, là một thiết bị cơ điện tử được sử dụng để chuyển đổi các tín hiệu cơ học (như chuyển động quay hoặc tịnh tiến) thành tín hiệu điện tử (analog hoặc digital). Các tín hiệu này sau đó được sử dụng trong nhiều ứng dụng khác nhau như đo lường vị trí, tốc độ, và hướng di chuyển của động cơ hoặc các thành phần cơ khí khác.
Cấu Tạo Của Encoder
- Thân và trục: Thân của encoder là nơi chứa đĩa mã hóa và các cảm biến, trong khi trục là phần quay hoặc tịnh tiến để tạo ra tín hiệu.
- Nguồn phát sáng (LED): Một đèn LED phát sáng chiếu qua đĩa mã hóa để tạo ra các tín hiệu.
- Đĩa mã hóa (Code Disk): Đĩa này có các rãnh nhỏ giúp chia vòng quay thành các góc đều nhau, qua đó tạo ra các xung tín hiệu khi đĩa quay.
- Cảm biến ánh sáng (Photosensor): Bộ phận này thu nhận các tín hiệu ánh sáng bị gián đoạn khi đĩa quay để tạo ra tín hiệu đầu ra.
Nguyên Lý Hoạt Động
Khi trục của encoder quay, đĩa mã hóa bên trong encoder cũng quay theo. Ánh sáng từ đèn LED chiếu qua các rãnh trên đĩa, và cảm biến ánh sáng sẽ ghi nhận các xung tín hiệu được tạo ra do ánh sáng bị gián đoạn. Số lượng xung tín hiệu này sẽ tương ứng với số vòng quay của trục, giúp xác định vị trí, tốc độ và hướng di chuyển của động cơ hoặc thiết bị.
Các Loại Encoder
- Incremental Encoder (Encoder Tương Đối): Loại encoder này tạo ra một chuỗi các xung vuông và được sử dụng để đo lường vị trí tương đối, tốc độ và hướng của trục quay.
- Absolute Encoder (Encoder Tuyệt Đối): Khác với incremental encoder, loại này tạo ra một mã nhị phân duy nhất cho mỗi vị trí của trục, giúp ghi nhớ vị trí ngay cả khi bị mất nguồn.
- Encoder dây rút: Sử dụng dây rút để đo lường sự kéo dãn và cuộn dây, thường được dùng trong các ứng dụng cân trục, cân móc và cân cầu trục.
- Encoder bánh xe: Được gắn vào bánh xe hoặc trục quay để đo lường vị trí và tốc độ di chuyển của bánh xe, thường dùng trong robot và các ứng dụng công nghiệp.
Ứng Dụng Của Encoder
Encoder được ứng dụng rộng rãi trong nhiều lĩnh vực công nghiệp, đặc biệt là trong việc điều khiển động cơ và đo lường chuyển động. Một số ứng dụng phổ biến bao gồm:
- Điều khiển động cơ: Sử dụng encoder để xác định chính xác vị trí và tốc độ của động cơ, giúp cải thiện độ chính xác trong quá trình vận hành.
- Robot công nghiệp: Trong các cánh tay robot, encoder giúp kiểm soát góc quay của các khớp, đảm bảo hoạt động chính xác và ổn định.
- Máy CNC: Encoder được tích hợp trong các máy cắt, máy phay, và máy tiện để đo lường và kiểm soát vị trí dao cắt, giúp gia công chính xác các chi tiết.
- Băng tải: Sử dụng encoder để đo tốc độ và chiều dài của băng tải, đảm bảo quá trình vận chuyển hàng hóa diễn ra trơn tru.
Những Thông Số Cần Lưu Ý Khi Chọn Encoder
| Đường kính trục: | Từ 5-50mm, tùy thuộc vào loại encoder và ứng dụng cụ thể. |
| Độ phân giải: | Được tính bằng số xung trên mỗi vòng quay, ảnh hưởng đến độ chính xác của đo lường. |
| Điện áp: | Cần chú ý đến nguồn cấp điện áp để tránh làm hỏng encoder. |
| Ngõ ra: | Các dạng ngõ ra phổ biến bao gồm AB, ABZ, AB đảo, ABZ đảo. |
| Dạng ngõ ra: | Có nhiều dạng như Open Collector, Voltage Output, Line Driver,… |
| Dây cáp: | Độ dài cáp ảnh hưởng đến tín hiệu, thông thường từ 1-3m. |
Kết Luận
Encoder là một thiết bị quan trọng trong lĩnh vực điện tử kỹ thuật số và tự động hóa, với nhiều ứng dụng trong các ngành công nghiệp khác nhau. Việc hiểu rõ về cấu tạo, nguyên lý hoạt động, và cách lựa chọn encoder phù hợp sẽ giúp cải thiện hiệu suất và độ chính xác trong các hệ thống đo lường và điều khiển.
Tổng Quan Về Encoder
Encoder, hay còn gọi là bộ mã hóa, là một thiết bị quan trọng trong điện tử kỹ thuật số, được sử dụng để chuyển đổi các tín hiệu cơ học như chuyển động quay hoặc tịnh tiến thành tín hiệu điện tử dạng số hoặc analog. Encoder đóng vai trò then chốt trong việc đo lường và điều khiển chính xác các thiết bị cơ điện tử.
Có hai loại encoder chính: Incremental Encoder và Absolute Encoder. Incremental Encoder tạo ra một chuỗi các xung tín hiệu liên tục khi trục của nó quay, từ đó có thể tính toán vị trí tương đối, tốc độ và hướng di chuyển. Trong khi đó, Absolute Encoder cung cấp một mã nhị phân độc nhất cho mỗi vị trí của trục quay, cho phép lưu giữ thông tin vị trí ngay cả khi bị mất điện.
- Cấu tạo: Encoder thường bao gồm một đĩa mã hóa (Code Disk) với các rãnh hoặc khe cắt, cảm biến ánh sáng (Photosensor) để đọc các xung tín hiệu, và một nguồn sáng như LED để chiếu sáng đĩa mã hóa.
- Nguyên lý hoạt động: Khi trục của encoder quay, đĩa mã hóa bên trong sẽ tạo ra các xung tín hiệu bằng cách gián đoạn hoặc cho phép ánh sáng chiếu qua các rãnh trên đĩa. Số lượng xung tín hiệu này được cảm biến ánh sáng ghi lại, từ đó xác định vị trí hoặc tốc độ của trục quay.
- Ứng dụng: Encoder được sử dụng rộng rãi trong các hệ thống điều khiển động cơ, robot công nghiệp, máy CNC, và các hệ thống đo lường vị trí và tốc độ khác.
Encoder là thành phần không thể thiếu trong các hệ thống tự động hóa và điều khiển hiện đại. Với khả năng cung cấp thông tin chính xác về vị trí, tốc độ và hướng di chuyển, encoder giúp cải thiện hiệu suất và độ tin cậy của các thiết bị và hệ thống kỹ thuật số.
Cấu Tạo và Nguyên Lý Hoạt Động
Encoder là một thiết bị cơ điện tử, có chức năng chuyển đổi các chuyển động cơ học thành tín hiệu điện tử. Để hiểu rõ hơn về cách mà encoder thực hiện nhiệm vụ này, chúng ta sẽ xem xét cấu tạo chi tiết và nguyên lý hoạt động của nó.
Cấu Tạo Của Encoder
- Đĩa mã hóa (Code Disk): Đây là thành phần chính của encoder, được chế tạo từ vật liệu trong suốt hoặc phản chiếu ánh sáng. Đĩa này có các rãnh hoặc lỗ nhỏ, được sắp xếp theo một mẫu nhất định để tạo ra các tín hiệu số khi ánh sáng đi qua.
- LED hoặc nguồn sáng: Nguồn sáng, thường là đèn LED, được đặt một bên của đĩa mã hóa. Khi đĩa quay, ánh sáng từ đèn LED sẽ chiếu qua các rãnh hoặc lỗ của đĩa.
- Cảm biến ánh sáng (Photosensor): Được đặt ở phía đối diện với đèn LED, cảm biến này phát hiện ánh sáng khi nó đi qua đĩa mã hóa và tạo ra các xung điện tín hiệu tương ứng.
- Mạch xử lý: Mạch này nhận tín hiệu từ cảm biến và xử lý chúng để xác định vị trí, tốc độ, và hướng di chuyển của trục quay.
Nguyên Lý Hoạt Động Của Encoder
Nguyên lý hoạt động của encoder dựa trên việc phát hiện sự thay đổi trong ánh sáng khi đĩa mã hóa quay. Các bước hoạt động cơ bản như sau:
- Khi trục của encoder quay, đĩa mã hóa cũng quay theo. Các rãnh hoặc lỗ trên đĩa sẽ lần lượt cản hoặc cho phép ánh sáng từ đèn LED đi qua.
- Cảm biến ánh sáng ghi nhận sự thay đổi này và tạo ra các xung điện, tương ứng với số lần ánh sáng bị cản hoặc đi qua.
- Mạch xử lý tiếp nhận các xung điện này, đếm số xung để xác định vị trí tương đối của trục quay. Nếu encoder là loại tuyệt đối, mỗi vị trí của trục sẽ tương ứng với một mã nhị phân duy nhất.
- Tín hiệu đầu ra từ encoder được sử dụng để điều khiển hoặc giám sát các hệ thống cơ điện khác, chẳng hạn như điều khiển động cơ, đo lường vị trí hoặc tốc độ.
Nhờ vào cấu tạo và nguyên lý hoạt động này, encoder đóng vai trò then chốt trong việc đảm bảo độ chính xác và độ tin cậy của các hệ thống tự động hóa và điều khiển hiện đại.

Lựa Chọn và Lắp Đặt Encoder
Việc lựa chọn và lắp đặt encoder đúng cách đóng vai trò quan trọng trong việc đảm bảo hệ thống hoạt động hiệu quả và chính xác. Dưới đây là hướng dẫn chi tiết từng bước về cách lựa chọn và lắp đặt encoder.
Những Tiêu Chí Cần Cân Nhắc Khi Chọn Mua Encoder
- Loại encoder: Trước tiên, cần xác định xem bạn cần loại encoder tuyệt đối (absolute encoder) hay encoder tương đối (incremental encoder). Encoder tuyệt đối phù hợp với các ứng dụng yêu cầu độ chính xác cao và có khả năng ghi nhớ vị trí khi mất nguồn, trong khi encoder tương đối thường đơn giản hơn và phù hợp với các ứng dụng không đòi hỏi độ chính xác quá cao.
- Độ phân giải (Resolution): Độ phân giải của encoder quyết định mức độ chi tiết mà nó có thể đo lường. Độ phân giải càng cao thì khả năng đo lường càng chính xác. Độ phân giải thường được đo bằng số xung trên mỗi vòng quay của trục (Pulses Per Revolution - PPR).
- Đường kính trục: Encoder cần phải phù hợp với kích thước trục của động cơ hoặc thiết bị mà nó được gắn vào. Đường kính trục có thể dao động từ 5mm đến 50mm, và có thể là trục âm hoặc trục dương.
- Loại tín hiệu đầu ra: Xác định loại tín hiệu mà hệ thống của bạn yêu cầu, như tín hiệu xung vuông, tín hiệu analog hay tín hiệu kỹ thuật số. Điều này phụ thuộc vào thiết bị điều khiển mà bạn sử dụng.
- Môi trường hoạt động: Xem xét các yếu tố môi trường như nhiệt độ, độ ẩm, và khả năng chống bụi hoặc chống nước của encoder. Một số encoder được thiết kế để hoạt động trong môi trường khắc nghiệt.
Hướng Dẫn Lắp Đặt Encoder Đúng Cách
- Chuẩn bị trước khi lắp đặt: Đảm bảo rằng encoder và các bộ phận liên quan không bị hỏng hóc và hoạt động bình thường. Đọc kỹ hướng dẫn lắp đặt của nhà sản xuất.
- Lắp đặt encoder lên trục: Gắn encoder vào trục động cơ hoặc thiết bị cần đo lường. Đảm bảo rằng encoder được cố định chắc chắn, không bị lỏng lẻo trong quá trình hoạt động.
- Kết nối dây dẫn: Nối các dây dẫn của encoder với hệ thống điều khiển. Hãy đảm bảo rằng kết nối đúng theo sơ đồ của nhà sản xuất và sử dụng các loại dây phù hợp để tránh nhiễu điện.
- Kiểm tra tín hiệu: Sau khi lắp đặt, tiến hành kiểm tra tín hiệu đầu ra từ encoder để đảm bảo rằng nó hoạt động chính xác. Điều chỉnh nếu cần thiết để đảm bảo các thông số kỹ thuật như độ phân giải và loại tín hiệu đều đúng như yêu cầu.
- Bảo trì định kỳ: Thường xuyên kiểm tra và bảo trì encoder để phát hiện và khắc phục sớm các vấn đề có thể ảnh hưởng đến hiệu suất hoạt động.
Khắc Phục Các Sự Cố Thường Gặp Khi Sử Dụng Encoder
- Tín hiệu bị nhiễu: Nếu tín hiệu từ encoder bị nhiễu, kiểm tra các kết nối dây và đảm bảo chúng không bị lỏng hoặc đứt. Sử dụng cáp chống nhiễu nếu cần thiết.
- Sai số tích lũy: Encoder tương đối có thể gặp phải vấn đề sai số tích lũy theo thời gian. Để khắc phục, bạn cần thường xuyên hiệu chỉnh hệ thống và kiểm tra lại các thông số đầu vào.
- Hỏng hóc vật lý: Nếu encoder bị hư hỏng do va đập hoặc môi trường khắc nghiệt, cần thay thế bằng một encoder mới có độ bền và khả năng chịu đựng tốt hơn.

Các Ứng Dụng Thực Tế của Encoder
Encoder là một thiết bị không thể thiếu trong nhiều ngành công nghiệp và ứng dụng kỹ thuật hiện đại nhờ vào khả năng đo lường chính xác vị trí, tốc độ và hướng của các chuyển động. Dưới đây là một số ứng dụng phổ biến của encoder trong thực tế:
Ứng dụng trong điều khiển động cơ
Encoder thường được sử dụng để đo lường và điều khiển tốc độ cũng như vị trí của động cơ. Khi gắn lên trục động cơ, encoder sẽ phát tín hiệu phản hồi để hệ thống điều khiển có thể tính toán và điều chỉnh tốc độ quay, hướng quay một cách chính xác.
Ứng dụng trong robot công nghiệp
Trong lĩnh vực robot công nghiệp, encoder đóng vai trò quan trọng trong việc xác định vị trí và điều khiển chuyển động của các cánh tay robot. Nhờ encoder, các robot có thể thực hiện các thao tác với độ chính xác cao, từ việc lắp ráp linh kiện đến hàn các chi tiết nhỏ.
Ứng dụng trong các máy CNC và gia công cơ khí
Các máy CNC thường sử dụng encoder để theo dõi vị trí của các trục và công cụ cắt trong quá trình gia công. Điều này giúp đảm bảo rằng mỗi chi tiết được cắt gọt với độ chính xác cao nhất có thể, giảm thiểu sai số trong sản xuất hàng loạt.
Ứng dụng trong hệ thống băng tải và vận chuyển
Encoder được lắp đặt trên các hệ thống băng tải để đo tốc độ di chuyển của băng tải, đảm bảo quá trình vận chuyển hàng hóa diễn ra liên tục và chính xác. Ngoài ra, chúng còn giúp đồng bộ hóa hoạt động giữa các băng tải và các hệ thống điều khiển khác.
Ứng dụng trong ngành ô tô
Trong ngành công nghiệp ô tô, encoder được sử dụng trong các hệ thống điều khiển động cơ và các cảm biến tốc độ. Encoder giúp kiểm soát tốc độ và vị trí của các bộ phận trong xe, từ đó đảm bảo an toàn và hiệu suất của phương tiện.
Ứng dụng trong y tế và khoa học
Trong y tế, encoder được sử dụng trong các thiết bị như máy quét y tế, kính hiển vi, và các thiết bị tự động hóa trong phòng thí nghiệm. Trong khoa học, chúng thường được sử dụng để định vị kính viễn vọng hoặc các dụng cụ đo lường chính xác khác.
Những ứng dụng trên chỉ là một số ví dụ tiêu biểu, cho thấy vai trò quan trọng và đa dạng của encoder trong nhiều lĩnh vực khác nhau. Sự phát triển của công nghệ encoder tiếp tục mở ra nhiều cơ hội và ứng dụng mới trong tương lai.

Xu Hướng Phát Triển của Công Nghệ Encoder
Công nghệ Encoder đang trải qua những bước phát triển mạnh mẽ, được thúc đẩy bởi sự gia tăng nhu cầu trong các lĩnh vực công nghiệp và tự động hóa. Xu hướng phát triển của công nghệ này trong thời gian tới có thể được chia thành ba hướng chính:
1. Tăng Cường Độ Chính Xác và Độ Phân Giải
Các nhà sản xuất đang không ngừng cải thiện độ chính xác và độ phân giải của các thiết bị Encoder. Xu hướng này đặc biệt quan trọng trong các ngành công nghiệp yêu cầu kiểm soát vị trí và tốc độ cực kỳ chính xác, như trong các hệ thống điều khiển động cơ, máy CNC, và robot công nghiệp. Độ phân giải cao hơn cho phép hệ thống phản hồi nhanh hơn và chính xác hơn đối với các thay đổi, đảm bảo sự ổn định và hiệu suất tối ưu trong quá trình vận hành.
2. Tích Hợp Công Nghệ IoT và AI
Với sự phát triển của Internet vạn vật (IoT) và trí tuệ nhân tạo (AI), các hệ thống Encoder ngày càng được tích hợp sâu vào các mạng lưới thông minh. Encoder hiện đại không chỉ cung cấp dữ liệu về vị trí và tốc độ mà còn có khả năng xử lý dữ liệu tại chỗ và gửi thông tin theo thời gian thực đến các hệ thống quản lý từ xa. Điều này tạo điều kiện cho việc giám sát và phân tích dữ liệu liên tục, giúp tối ưu hóa quá trình vận hành và bảo trì.
3. Xu Hướng Miniaturization và Tiết Kiệm Năng Lượng
Xu hướng thu nhỏ kích thước và giảm tiêu thụ năng lượng của các Encoder đang ngày càng trở nên phổ biến. Điều này đặc biệt hữu ích trong các ứng dụng đòi hỏi thiết bị phải có kích thước nhỏ gọn, như trong các thiết bị y tế, thiết bị di động, hoặc các hệ thống tự động hóa nơi không gian bị hạn chế. Cùng với đó, việc giảm thiểu năng lượng tiêu thụ không chỉ giúp tiết kiệm chi phí mà còn đóng góp vào việc bảo vệ môi trường.
Nhìn chung, công nghệ Encoder đang tiếp tục phát triển để đáp ứng những yêu cầu ngày càng cao của thị trường. Sự kết hợp giữa độ chính xác cao, khả năng tích hợp với các hệ thống thông minh và tiết kiệm năng lượng sẽ là chìa khóa dẫn đến sự thành công trong tương lai.
XEM THÊM:
10 Dạng Bài Tập Về Encoder trong Điện Tử Kỹ Thuật Số
Dưới đây là 10 dạng bài tập phổ biến về Encoder trong điện tử kỹ thuật số, giúp bạn hiểu rõ hơn về cách hoạt động, ứng dụng và phân tích các hệ thống sử dụng Encoder.
-
Dạng 1: Tính toán số xung tín hiệu từ Encoder
Bài tập này yêu cầu tính toán số lượng xung mà Encoder tạo ra dựa trên các thông số như độ phân giải, tốc độ quay của trục và thời gian đo.
Ví dụ: Một Encoder có độ phân giải \(1000\) xung/vòng, quay với tốc độ \(60\) vòng/phút. Tính số xung trong \(1\) giây.
-
Dạng 2: Xác định vị trí và tốc độ động cơ dựa trên tín hiệu Encoder
Bài tập này tập trung vào việc sử dụng tín hiệu từ Encoder để xác định vị trí và tốc độ của động cơ.
Ví dụ: Sử dụng tín hiệu từ Encoder để tính toán vị trí góc của trục sau \(10\) giây.
-
Dạng 3: Phân tích lỗi tín hiệu trong hệ thống sử dụng Encoder
Bài tập này yêu cầu phân tích và xác định các lỗi có thể xảy ra khi thu thập tín hiệu từ Encoder, cũng như các phương pháp để khắc phục chúng.
Ví dụ: Phân tích lỗi mất xung trong hệ thống Encoder và đề xuất giải pháp khắc phục.
-
Dạng 4: Thiết kế mạch điện sử dụng Encoder để điều khiển động cơ
Trong bài tập này, bạn sẽ được yêu cầu thiết kế một mạch điện hoàn chỉnh sử dụng Encoder để điều khiển tốc độ hoặc vị trí của động cơ.
Ví dụ: Thiết kế mạch điều khiển tốc độ động cơ DC dựa trên tín hiệu từ Encoder.
-
Dạng 5: Tính toán độ phân giải của Encoder
Bài tập này tập trung vào việc tính toán độ phân giải cần thiết của một Encoder để đạt được độ chính xác mong muốn trong một ứng dụng cụ thể.
Ví dụ: Xác định độ phân giải tối thiểu của Encoder để đảm bảo độ chính xác vị trí \(0.1\) mm.
-
Dạng 6: Ứng dụng Encoder trong hệ thống đo lường tốc độ
Bài tập này yêu cầu thiết kế một hệ thống đo lường tốc độ dựa trên tín hiệu từ Encoder.
Ví dụ: Thiết kế hệ thống đo lường tốc độ của một băng tải sử dụng Encoder quang học.
-
Dạng 7: Lập trình điều khiển động cơ sử dụng tín hiệu Encoder
Bài tập này liên quan đến lập trình vi điều khiển để đọc tín hiệu từ Encoder và điều khiển động cơ theo mong muốn.
Ví dụ: Viết chương trình điều khiển tốc độ động cơ servo dựa trên tín hiệu từ Encoder.
-
Dạng 8: Thiết kế và mô phỏng hệ thống băng tải sử dụng Encoder
Bài tập này yêu cầu bạn thiết kế và mô phỏng một hệ thống băng tải, trong đó sử dụng Encoder để điều khiển và giám sát hoạt động của hệ thống.
Ví dụ: Mô phỏng hoạt động của một hệ thống băng tải với Encoder điều khiển vị trí dừng chính xác.
-
Dạng 9: Phân tích hiệu suất của hệ thống điều khiển sử dụng Encoder
Bài tập này yêu cầu phân tích và đánh giá hiệu suất của một hệ thống điều khiển dựa trên tín hiệu từ Encoder, bao gồm độ chính xác, độ trễ và độ ổn định.
Ví dụ: Đánh giá hiệu suất của hệ thống điều khiển tốc độ động cơ DC sử dụng Encoder từ tính.
-
Dạng 10: Đo lường và điều khiển vị trí robot sử dụng Encoder
Bài tập này tập trung vào việc sử dụng Encoder để đo lường và điều khiển vị trí của một robot trong không gian.
Ví dụ: Thiết kế hệ thống đo lường và điều khiển vị trí của cánh tay robot sử dụng Encoder tuyệt đối.
Dạng 1: Tính toán số xung tín hiệu từ Encoder
Trong hệ thống điều khiển và đo lường, việc tính toán số xung tín hiệu từ Encoder là một bài toán cơ bản nhưng rất quan trọng. Dưới đây là các bước chi tiết để thực hiện việc này:
-
Xác định độ phân giải của Encoder:
Độ phân giải của Encoder thường được xác định bằng số xung trên mỗi vòng quay (Pulses Per Revolution - PPR). Ví dụ, nếu Encoder có độ phân giải 1024 PPR, điều này có nghĩa là mỗi vòng quay của trục sẽ tạo ra 1024 xung tín hiệu.
-
Tính số xung tín hiệu dựa trên góc quay:
Giả sử Encoder quay được một góc \(\theta\) độ, số xung tín hiệu sinh ra có thể được tính bằng công thức:
\[
Số \, xung = \frac{PPR \times \theta}{360}
\]Trong đó, PPR là độ phân giải của Encoder và \(\theta\) là góc quay.
-
Tính số xung tín hiệu trong một khoảng thời gian nhất định:
Nếu Encoder quay với tốc độ \(n\) vòng/phút (RPM), số xung tín hiệu sinh ra trong thời gian \(t\) giây được tính bằng công thức:
\[
Số \, xung = \frac{PPR \times n \times t}{60}
\] -
Áp dụng vào thực tế:
Đối với các hệ thống điều khiển động cơ, các giá trị xung tín hiệu này sẽ được đưa vào bộ điều khiển để thực hiện các nhiệm vụ như điều khiển vị trí, tốc độ hoặc gia tốc của động cơ.
Qua các bước trên, bạn đã có thể tính toán được số xung tín hiệu từ Encoder trong các ứng dụng thực tế, từ đó hỗ trợ cho việc điều khiển chính xác trong các hệ thống kỹ thuật số.

Dạng 2: Xác định vị trí và tốc độ động cơ dựa trên tín hiệu Encoder
Encoder là một trong những thiết bị quan trọng giúp xác định vị trí và tốc độ của động cơ trong các hệ thống điều khiển tự động. Việc tính toán và sử dụng tín hiệu từ encoder giúp tối ưu hóa hiệu suất làm việc của các hệ thống cơ điện tử. Dưới đây là cách xác định vị trí và tốc độ động cơ dựa trên tín hiệu từ encoder:
Xác định vị trí động cơ
Vị trí của động cơ được xác định thông qua số lượng xung mà encoder phát ra trong quá trình động cơ quay. Khi động cơ quay, encoder sẽ phát ra các xung tín hiệu dựa trên số lượng rãnh trên đĩa quang của nó.
Giả sử một vòng quay của động cơ tương ứng với \(N\) xung từ encoder, thì vị trí góc \(\theta\) của động cơ sau khi quay \(n\) xung có thể được xác định bằng công thức:
Với công thức này, bạn có thể tính toán chính xác vị trí góc hiện tại của động cơ dựa trên số lượng xung mà encoder đã ghi nhận.
Xác định tốc độ động cơ
Tốc độ quay của động cơ được xác định dựa trên số xung ghi nhận được trong một khoảng thời gian nhất định. Giả sử số xung ghi nhận trong khoảng thời gian \(t\) là \(\Delta n\), thì tốc độ góc \(\omega\) của động cơ có thể được tính bằng:
Hoặc nếu muốn xác định tốc độ theo vòng/phút (RPM - Revolutions Per Minute), bạn có thể sử dụng công thức sau:
Như vậy, thông qua việc tính toán số xung và thời gian, bạn có thể dễ dàng xác định được tốc độ quay của động cơ.
Ví dụ thực tế
Giả sử bạn có một encoder với độ phân giải 1000 xung/vòng. Nếu trong thời gian 0,5 giây, encoder ghi nhận được 500 xung, tốc độ góc của động cơ sẽ là:
Hoặc theo RPM:
Như vậy, với các công thức trên, bạn có thể dễ dàng tính toán vị trí và tốc độ của động cơ trong các hệ thống điều khiển, đảm bảo độ chính xác cao trong quá trình vận hành.
Dạng 3: Phân tích lỗi tín hiệu trong hệ thống sử dụng Encoder
Trong hệ thống sử dụng Encoder, việc phân tích lỗi tín hiệu đóng vai trò quan trọng trong việc đảm bảo hiệu suất và độ chính xác của hệ thống. Các lỗi có thể phát sinh từ nhiều nguyên nhân khác nhau, và cần được xác định và xử lý kịp thời để tránh ảnh hưởng đến hoạt động của toàn bộ hệ thống.
- 1. Lỗi cơ học:
Lỗi này thường xuất phát từ các yếu tố như rung động, lệch trục, hoặc mòn các bộ phận cơ khí. Khi có sự cố cơ học, tín hiệu từ Encoder có thể bị méo, gây ra các sai lệch trong việc đo lường vị trí hoặc tốc độ. Để khắc phục, cần kiểm tra và bảo trì định kỳ các bộ phận cơ khí liên quan.
- 2. Lỗi do nhiễu điện từ:
Nhiễu điện từ từ các thiết bị xung quanh hoặc từ chính môi trường hoạt động có thể ảnh hưởng đến tín hiệu của Encoder. Để giảm thiểu nhiễu, cần sử dụng các biện pháp che chắn hoặc cách ly tín hiệu, cũng như chọn loại cáp tín hiệu có khả năng chống nhiễu tốt.
- 3. Lỗi trong hệ thống điện:
Lỗi này thường xảy ra do các vấn đề liên quan đến nguồn cung cấp điện không ổn định, kết nối kém, hoặc dây dẫn bị hỏng. Để tránh tình trạng này, cần đảm bảo rằng hệ thống điện luôn được cấp nguồn ổn định và các kết nối được thực hiện chắc chắn.
- 4. Lỗi trong bộ xử lý tín hiệu:
Bộ xử lý tín hiệu trong hệ thống có thể gặp lỗi do lập trình sai hoặc do phần cứng bị hỏng. Khi gặp phải lỗi này, cần kiểm tra lại chương trình điều khiển và thực hiện các thử nghiệm để xác định nguyên nhân cụ thể. Việc cập nhật phần mềm và kiểm tra phần cứng định kỳ cũng là một cách hữu hiệu để ngăn ngừa lỗi.
- 5. Lỗi do sai lệch tín hiệu:
Sai lệch tín hiệu thường xảy ra khi có sự không đồng nhất trong quá trình chuyển đổi tín hiệu từ cơ học sang điện tử. Điều này có thể do các yếu tố như tốc độ quay không ổn định hoặc chất lượng tín hiệu kém. Để khắc phục, cần kiểm tra và cân chỉnh lại hệ thống đo lường, đảm bảo rằng các thành phần hoạt động đúng thông số kỹ thuật.
Việc phân tích và khắc phục lỗi tín hiệu trong hệ thống sử dụng Encoder đòi hỏi sự cẩn trọng và chính xác. Bằng cách thực hiện các bước kiểm tra và bảo trì định kỳ, cũng như sử dụng các thiết bị chất lượng cao, hệ thống sẽ hoạt động ổn định và hiệu quả hơn.
Dạng 4: Thiết kế mạch điện sử dụng Encoder để điều khiển động cơ
Thiết kế mạch điện sử dụng Encoder để điều khiển động cơ là một quy trình phức tạp nhưng quan trọng trong việc đảm bảo hệ thống hoạt động chính xác và hiệu quả. Dưới đây là các bước cơ bản để thiết kế mạch này:
1. Chuẩn bị các thành phần cần thiết
- Encoder (Encoder quang học hoặc từ tính)
- Động cơ (DC hoặc động cơ bước)
- Bộ điều khiển động cơ (Motor Driver)
- Vi điều khiển (Ví dụ: Arduino, PIC, hoặc STM32)
- Nguồn cấp điện phù hợp
- Các linh kiện phụ trợ (Điện trở, tụ điện, diode, v.v.)
2. Kết nối phần cứng
Bước tiếp theo là kết nối các thành phần với nhau:
- Kết nối các ngõ ra tín hiệu của Encoder (A, B, và nếu có, Z) tới các chân vào của vi điều khiển.
- Kết nối ngõ ra điều khiển của vi điều khiển tới bộ điều khiển động cơ.
- Kết nối bộ điều khiển động cơ tới động cơ.
- Đảm bảo các kết nối nguồn điện cho các thành phần đều chính xác và ổn định.
3. Viết chương trình điều khiển
Viết chương trình trên vi điều khiển để đọc tín hiệu từ Encoder và điều khiển động cơ tương ứng. Ví dụ:
// Đo tốc độ từ Encoder
int pulseCount = 0;
int lastState = LOW;
void setup() {
pinMode(encoderPinA, INPUT);
attachInterrupt(digitalPinToInterrupt(encoderPinA), countPulse, CHANGE);
}
void loop() {
// Điều khiển động cơ dựa trên số xung đếm được
int speed = calculateSpeed(pulseCount);
controlMotor(speed);
}
void countPulse() {
int state = digitalRead(encoderPinA);
if (state != lastState) {
pulseCount++;
lastState = state;
}
}
int calculateSpeed(int pulseCount) {
// Tính toán tốc độ dựa trên số xung
return pulseCount * factor;
}
void controlMotor(int speed) {
analogWrite(motorPin, speed);
}
4. Kiểm tra và tinh chỉnh hệ thống
Sau khi hoàn thành phần kết nối và lập trình, bước cuối cùng là kiểm tra và tinh chỉnh hệ thống:
- Đảm bảo rằng Encoder đang cung cấp tín hiệu chính xác.
- Kiểm tra xem động cơ có phản hồi đúng với tín hiệu từ Encoder hay không.
- Điều chỉnh các thông số trong chương trình điều khiển để đạt hiệu suất tối ưu.
Việc thiết kế mạch điện sử dụng Encoder để điều khiển động cơ đòi hỏi sự hiểu biết sâu sắc về cả phần cứng và phần mềm. Tuy nhiên, với các bước hướng dẫn trên, bạn có thể bắt đầu thực hiện dự án của mình một cách hiệu quả.
Dạng 5: Tính toán độ phân giải của Encoder
Độ phân giải của một encoder là yếu tố quan trọng để xác định độ chính xác của các phép đo về vị trí hoặc tốc độ trong hệ thống điều khiển. Độ phân giải thường được tính bằng số xung (pulses) tạo ra trên mỗi vòng quay của trục encoder.
Để tính toán độ phân giải của encoder, bạn có thể sử dụng công thức sau:
Trong đó:
- R là độ phân giải của encoder (tính bằng xung trên mỗi đơn vị góc, thường là xung trên mỗi độ).
- N là số xung mà encoder tạo ra trên mỗi vòng quay (tính bằng xung/vòng).
- S là góc quay tính bằng độ cần đo lường.
Ví dụ, nếu một encoder có 360 xung trên mỗi vòng quay và bạn cần tính toán số xung cho một góc quay 90 độ, công thức sẽ là:
Như vậy, trong trường hợp này, encoder sẽ tạo ra 90 xung khi trục quay một góc 90 độ.
Ứng dụng thực tế
Độ phân giải của encoder ảnh hưởng trực tiếp đến khả năng đo lường và điều khiển chính xác trong các ứng dụng như:
- Điều khiển vị trí và tốc độ của động cơ trong các máy CNC.
- Giám sát chuyển động và vị trí trong hệ thống robot.
- Đo lường và kiểm soát tốc độ trong các hệ thống băng tải.
Việc lựa chọn độ phân giải phù hợp sẽ giúp tăng độ chính xác của hệ thống, đồng thời đảm bảo hiệu quả hoạt động và giảm thiểu sai số trong quá trình vận hành.
Dạng 6: Ứng dụng Encoder trong hệ thống đo lường tốc độ
Encoder là một thiết bị quan trọng trong các hệ thống đo lường tốc độ, đặc biệt là trong việc giám sát và điều khiển tốc độ của động cơ. Hệ thống đo lường tốc độ thường sử dụng encoder để chuyển đổi chuyển động cơ học thành tín hiệu điện tử, từ đó xác định tốc độ quay của một trục hoặc bộ phận chuyển động.
1. Nguyên lý đo lường tốc độ sử dụng Encoder
Có hai phương pháp chính để đo lường tốc độ bằng encoder: phương pháp dựa trên tần số xung (pulse frequency) và phương pháp dựa trên chu kỳ xung (pulse period).
- Phương pháp tần số xung: Trong phương pháp này, tốc độ góc \(\omega\) được tính bằng cách đếm số lượng xung trong một khoảng thời gian cố định. Công thức tính toán như sau:
\[
\omega = \frac{n}{N \cdot t}
\]
Trong đó:
- \(n\) là số lượng xung đếm được trong khoảng thời gian mẫu \(t\).
- \(N\) là số xung trên mỗi vòng quay của encoder.
- Phương pháp chu kỳ xung: Tốc độ góc \(\omega\) được xác định bằng cách đo thời gian giữa hai cạnh lên của hai xung liên tiếp. Công thức tính toán như sau:
\[
\omega = \frac{1}{N \cdot \frac{m}{f}}
\]
Trong đó:
- \(m\) là số chu kỳ của tín hiệu đồng hồ đo được trong khoảng thời gian giữa hai xung.
- \(f\) là tần số của tín hiệu đồng hồ.
2. Các bước thiết kế hệ thống đo lường tốc độ sử dụng Encoder
- Lựa chọn loại Encoder: Cần chọn encoder có độ phân giải và tần số xung phù hợp với ứng dụng cụ thể, đảm bảo đáp ứng được các yêu cầu về tốc độ và độ chính xác.
- Kết nối phần cứng: Kết nối các dây tín hiệu của encoder với bộ đếm xung hoặc hệ thống đo lường số liệu. Đảm bảo nguồn cấp điện cho encoder và các kết nối tín hiệu được thực hiện đúng cách.
- Phân tích và xử lý tín hiệu: Sử dụng bộ đếm xung hoặc vi điều khiển để đếm số lượng xung và tính toán tốc độ theo các phương pháp đã nêu trên. Kết quả tính toán có thể được hiển thị trực tiếp hoặc sử dụng để điều khiển hệ thống.
- Hiệu chuẩn và kiểm tra: Cuối cùng, hiệu chuẩn hệ thống đo lường bằng cách so sánh với các giá trị tham chiếu hoặc sử dụng các thiết bị đo tốc độ chính xác khác để đảm bảo kết quả đo lường là chính xác và ổn định.
3. Ứng dụng thực tế
Encoder được ứng dụng rộng rãi trong nhiều lĩnh vực như giám sát tốc độ động cơ trong các nhà máy, đo lường tốc độ quay của bánh xe trong hệ thống điều khiển phương tiện, và trong các hệ thống đo lường tốc độ gió hoặc dòng chảy trong các ứng dụng công nghiệp.
Việc sử dụng encoder trong hệ thống đo lường tốc độ giúp cải thiện độ chính xác, khả năng kiểm soát, và hiệu suất của các hệ thống công nghiệp.
Dạng 7: Lập trình điều khiển động cơ sử dụng tín hiệu Encoder
Trong bài học này, chúng ta sẽ tìm hiểu cách lập trình để điều khiển động cơ sử dụng tín hiệu từ Encoder. Đây là một dạng bài tập phổ biến trong lĩnh vực điện tử, đặc biệt trong việc kiểm soát chính xác vị trí và tốc độ của động cơ. Chúng ta sẽ sử dụng Arduino kết hợp với mạch điều khiển động cơ L298N để thực hiện việc này.
1. Chuẩn bị phần cứng
- Arduino UNO
- Mạch điều khiển động cơ L298N
- Động cơ DC
- Encoder gắn liền với động cơ
- Các dây kết nối
- Nguồn điện 12V cho động cơ
2. Sơ đồ đấu nối
Để bắt đầu, bạn cần kết nối các thiết bị như sau:
- Kết nối chân IN1 và IN2 của L298N với các chân số 8 và 7 của Arduino.
- Kết nối chân ENA của L298N với chân số 11 của Arduino để điều khiển tốc độ động cơ.
- Chân VCC của L298N được kết nối với nguồn 12V, và chân GND của L298N nối với GND của Arduino.
- Kết nối đầu ra của Encoder với các chân digital trên Arduino để đọc tín hiệu từ Encoder.
3. Lập trình Arduino
Mã nguồn dưới đây sẽ giúp bạn điều khiển động cơ bằng cách đọc tín hiệu từ Encoder và điều chỉnh tốc độ động cơ tương ứng:
#define IN1_PIN 8
#define IN2_PIN 7
#define EN1_PIN 11
#define ENCODER_A 2
#define ENCODER_B 3
volatile int pulse_count = 0;
int motor_speed = 0;
void setup() {
pinMode(IN1_PIN, OUTPUT);
pinMode(IN2_PIN, OUTPUT);
pinMode(EN1_PIN, OUTPUT);
pinMode(ENCODER_A, INPUT);
pinMode(ENCODER_B, INPUT);
attachInterrupt(digitalPinToInterrupt(ENCODER_A), readEncoder, RISING);
}
void loop() {
// Điều khiển chiều quay của động cơ
digitalWrite(IN1_PIN, HIGH);
digitalWrite(IN2_PIN, LOW);
// Tính toán tốc độ động cơ từ tín hiệu Encoder
motor_speed = pulse_count * 60; // Ví dụ: tốc độ động cơ tính bằng vòng/phút
analogWrite(EN1_PIN, motor_speed);
delay(100);
}
void readEncoder() {
int state = digitalRead(ENCODER_B);
if(state == LOW) {
pulse_count++;
} else {
pulse_count--;
}
}
4. Giải thích mã nguồn
Trong đoạn mã trên, chúng ta sử dụng hai chân số 2 và 3 của Arduino để đọc tín hiệu từ hai kênh của Encoder. Hàm attachInterrupt() được sử dụng để gọi hàm readEncoder() mỗi khi có xung từ Encoder, qua đó cập nhật số lượng xung đếm được.
Từ số lượng xung, ta có thể tính toán tốc độ động cơ và điều khiển nó thông qua chân EN1 bằng cách sử dụng PWM. Ngoài ra, bạn có thể điều chỉnh chiều quay của động cơ bằng cách thay đổi trạng thái của IN1 và IN2.
5. Kết luận
Bằng cách kết hợp các phần cứng và lập trình đơn giản, chúng ta có thể dễ dàng điều khiển động cơ một cách chính xác sử dụng tín hiệu từ Encoder. Đây là bước đầu tiên để hiểu sâu hơn về các hệ thống điều khiển phản hồi vòng kín trong các ứng dụng thực tế.
Dạng 8: Thiết kế và mô phỏng hệ thống băng tải sử dụng Encoder
Hệ thống băng tải là một thành phần quan trọng trong nhiều quy trình sản xuất và vận chuyển hàng hóa. Sử dụng Encoder trong hệ thống băng tải không chỉ giúp đo lường tốc độ mà còn cung cấp thông tin về vị trí chính xác của vật thể trên băng tải. Dưới đây là hướng dẫn chi tiết về việc thiết kế và mô phỏng hệ thống băng tải sử dụng Encoder.
1. Tổng Quan Về Hệ Thống Băng Tải Sử Dụng Encoder
- Băng tải: Là một hệ thống cơ khí dùng để vận chuyển vật liệu từ điểm A đến điểm B.
- Encoder: Là một cảm biến giúp đo lường các thông số như tốc độ, vị trí và hướng di chuyển của băng tải.
2. Yêu Cầu Thiết Kế
Để thiết kế một hệ thống băng tải sử dụng Encoder, cần xác định các yêu cầu chính như sau:
- Tốc độ băng tải: Cần xác định tốc độ tối đa của băng tải để chọn loại Encoder phù hợp.
- Độ chính xác: Độ phân giải của Encoder cần đủ cao để đảm bảo đo lường chính xác vị trí và tốc độ của băng tải.
- Khả năng chịu tải: Băng tải phải được thiết kế để chịu được tải trọng của hàng hóa vận chuyển.
3. Thiết Kế Mạch Điều Khiển
Một mạch điều khiển sử dụng Encoder bao gồm:
- Encoder: Chọn loại Encoder phù hợp, chẳng hạn như Encoder quang học hoặc Encoder từ tính, tùy thuộc vào ứng dụng cụ thể.
- Bộ vi xử lý (Microcontroller): Sử dụng bộ vi xử lý để đọc tín hiệu từ Encoder và điều khiển động cơ băng tải.
- Động cơ (Motor): Động cơ băng tải sẽ được điều khiển dựa trên tín hiệu đầu vào từ Encoder để duy trì tốc độ và vị trí mong muốn.
- Mạch điều khiển động cơ: Mạch này sẽ điều khiển tốc độ và hướng của động cơ dựa trên các tín hiệu từ bộ vi xử lý.
4. Mô Phỏng Hệ Thống
Trong quá trình mô phỏng, ta có thể sử dụng phần mềm như MATLAB, Simulink, hoặc các công cụ CAD để kiểm tra hoạt động của hệ thống trước khi triển khai thực tế. Các bước mô phỏng bao gồm:
- Thiết lập mô hình: Mô hình hóa các thành phần cơ bản của hệ thống, bao gồm băng tải, động cơ và Encoder.
- Mô phỏng hoạt động: Kiểm tra các thông số như tốc độ, vị trí và hiệu suất của băng tải trong điều kiện hoạt động thực tế.
- Điều chỉnh thông số: Tối ưu hóa các tham số của hệ thống để đạt hiệu suất tối đa.
5. Kết Luận
Việc thiết kế và mô phỏng hệ thống băng tải sử dụng Encoder đòi hỏi sự hiểu biết về cả cơ khí và điện tử. Encoder đóng vai trò quan trọng trong việc đảm bảo tính chính xác và hiệu suất của hệ thống. Thông qua quá trình mô phỏng, ta có thể dự đoán và cải thiện hoạt động của hệ thống trước khi áp dụng vào thực tế.
Dạng 9: Phân tích hiệu suất của hệ thống điều khiển sử dụng Encoder
Hệ thống điều khiển sử dụng encoder đóng vai trò quan trọng trong việc đo lường và kiểm soát chính xác vị trí, tốc độ và gia tốc của các thiết bị cơ khí. Để phân tích hiệu suất của các hệ thống này, chúng ta cần xem xét một số yếu tố cơ bản như độ chính xác, độ phân giải và độ ổn định của encoder.
1. Độ chính xác và độ phân giải của Encoder
Encoder có thể chuyển đổi chuyển động cơ học thành tín hiệu điện tử, từ đó xác định vị trí hoặc tốc độ. Độ chính xác của hệ thống được xác định bởi độ phân giải của encoder, tức là số lượng xung mà nó tạo ra trên mỗi vòng quay. Ví dụ, một encoder với 1000 xung/vòng sẽ cung cấp độ phân giải cao hơn so với một encoder chỉ có 500 xung/vòng.
Độ phân giải được tính bằng công thức:
\[
\text{Độ phân giải} = \frac{360^\circ}{\text{Số xung/vòng}}
\]
Đối với các hệ thống cần độ chính xác cao, độ phân giải của encoder phải đủ lớn để đảm bảo rằng mọi biến đổi nhỏ trong chuyển động cơ học đều được phát hiện.
2. Độ ổn định và khả năng phản hồi
Encoder còn phải đảm bảo độ ổn định trong quá trình hoạt động, đặc biệt trong môi trường có nhiều rung động hoặc nhiễu cơ học. Các yếu tố như nhiệt độ, độ ẩm, và rung động có thể ảnh hưởng đến hiệu suất của encoder.
Để đảm bảo khả năng phản hồi nhanh, hệ thống điều khiển phải xử lý tín hiệu từ encoder trong thời gian ngắn nhất có thể. Sự trễ trong phản hồi có thể gây ra sai số trong việc kiểm soát vị trí hoặc tốc độ, dẫn đến giảm hiệu suất tổng thể của hệ thống.
3. Phân tích hiệu suất tổng thể
Để phân tích hiệu suất tổng thể của hệ thống điều khiển sử dụng encoder, chúng ta cần đánh giá sự kết hợp giữa độ chính xác, độ phân giải, độ ổn định và khả năng phản hồi. Những yếu tố này ảnh hưởng trực tiếp đến độ tin cậy và hiệu quả của hệ thống.
Ví dụ, trong các ứng dụng điều khiển động cơ, nếu hệ thống encoder không đảm bảo độ chính xác cao, động cơ có thể không đạt được tốc độ hoặc vị trí mong muốn, gây ra sai lệch trong quá trình vận hành.
Kết luận, việc phân tích và tối ưu hóa các thông số liên quan đến encoder là cần thiết để đạt được hiệu suất cao trong các hệ thống điều khiển hiện đại.

Dạng 10: Đo lường và điều khiển vị trí robot sử dụng Encoder
Trong các hệ thống điều khiển robot, việc đo lường và điều khiển vị trí chính xác là yếu tố quan trọng. Encoder là một cảm biến chủ chốt giúp thực hiện nhiệm vụ này bằng cách chuyển đổi chuyển động quay của động cơ hoặc các cơ cấu thành tín hiệu số, từ đó cho phép hệ thống tính toán vị trí chính xác của robot.
1. Cấu trúc cơ bản của Encoder
Encoder thường bao gồm hai kênh đầu ra tín hiệu là kênh A và kênh B, được sắp xếp để tạo ra tín hiệu pha lệch 90 độ. Sự thay đổi pha giữa hai tín hiệu này cho phép hệ thống xác định được hướng quay của trục. Khi tín hiệu của kênh A dẫn trước kênh B, robot di chuyển theo một hướng, và ngược lại.
2. Phương pháp đo lường vị trí
Để đo lường vị trí của robot, hệ thống sử dụng encoder theo phương pháp đếm xung. Mỗi xung tương ứng với một khoảng di chuyển nhất định của robot. Tổng số xung đếm được sẽ cho biết robot đã di chuyển một khoảng cách bao xa.
Công thức tính toán khoảng cách di chuyển là:
Trong đó:
- D: Khoảng cách di chuyển.
- N: Số xung đếm được.
- C: Chu vi của bánh xe hoặc bước di chuyển mỗi vòng quay.
- P: Số xung trên mỗi vòng quay của encoder.
3. Điều khiển vị trí robot
Sau khi tính toán được vị trí hiện tại của robot, hệ thống điều khiển sẽ so sánh với vị trí mục tiêu để điều chỉnh tốc độ và hướng di chuyển của robot nhằm đạt được vị trí mong muốn. Quá trình này thường được thực hiện trong một vòng lặp điều khiển phản hồi, nơi vị trí và tốc độ của robot liên tục được cập nhật và điều chỉnh.
4. Xử lý tín hiệu Encoder
Để tăng độ chính xác trong đo lường và điều khiển, tín hiệu từ encoder có thể được xử lý thông qua các bộ lọc số hoặc phương pháp lấy mẫu đa kênh. Các bộ giải mã quadrature với các chế độ lấy mẫu khác nhau (như 1x, 2x, 4x) có thể được sử dụng để tăng độ phân giải và độ chính xác của hệ thống.
Ví dụ, chế độ lấy mẫu 4x sẽ cho độ chính xác cao hơn khi đếm tất cả các cạnh lên và xuống của cả hai kênh tín hiệu A và B. Tuy nhiên, điều này cũng đòi hỏi khả năng xử lý cao hơn từ phần cứng.
5. Mô phỏng và kiểm thử
Trước khi áp dụng vào thực tế, hệ thống đo lường và điều khiển vị trí robot sử dụng encoder thường được mô phỏng để kiểm tra tính chính xác và hiệu suất. Quá trình mô phỏng cho phép phát hiện các vấn đề tiềm ẩn và tối ưu hóa thuật toán điều khiển trước khi triển khai trên hệ thống thực.
Với sự hỗ trợ của các phần mềm mô phỏng và môi trường lập trình như MATLAB hay LabVIEW, kỹ sư có thể xây dựng mô hình động lực học của robot và mô phỏng phản hồi của hệ thống điều khiển với tín hiệu từ encoder. Điều này giúp giảm thiểu rủi ro và cải thiện hiệu suất hệ thống khi triển khai thực tế.