Chủ đề công thức tính vận tốc con lắc đơn: Bài viết này cung cấp hướng dẫn chi tiết về công thức tính vận tốc con lắc đơn, bao gồm cách tính vận tốc tại các vị trí khác nhau và ứng dụng vào giải các bài tập. Khám phá cách tính vận tốc cực đại, lực căng dây và những lưu ý khi học về con lắc đơn để nắm vững kiến thức và đạt kết quả cao trong các bài kiểm tra.
Mục lục
Công Thức Tính Vận Tốc Con Lắc Đơn
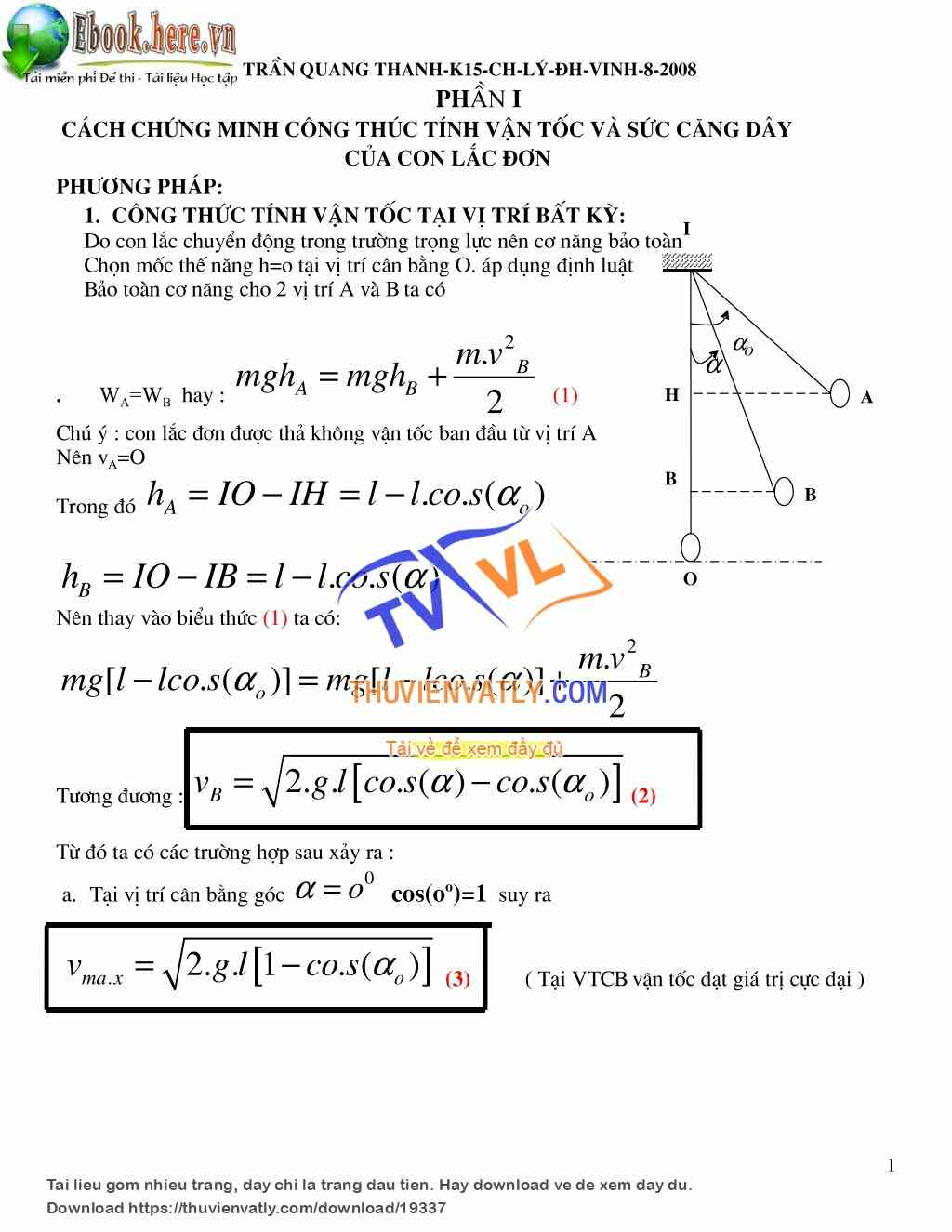
Con lắc đơn là một hệ thống vật lý cơ bản, bao gồm một vật nhỏ khối lượng m treo trên một dây không co giãn có chiều dài l. Vận tốc của con lắc đơn được xác định tại bất kỳ vị trí nào trong quá trình dao động dựa trên nguyên lý bảo toàn cơ năng.
Công Thức Tính Vận Tốc
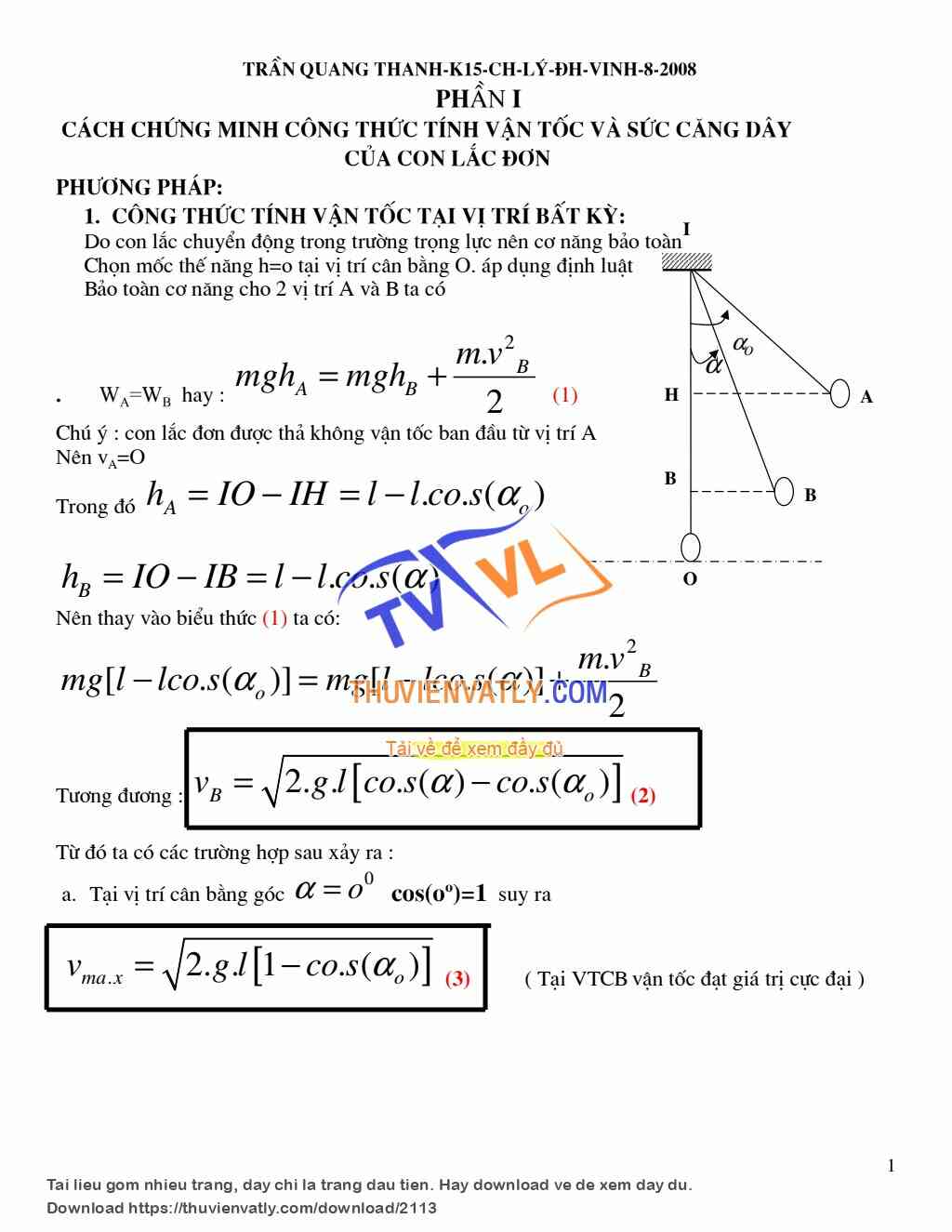
Vận tốc \(v\) của con lắc đơn tại vị trí có li độ góc \(\alpha\) được tính theo công thức:
\[
v = \sqrt{2gl(\cos\alpha - \cos\alpha_0)}
\]
Trong đó:
- \(v\) là vận tốc của con lắc tại vị trí có li độ góc \(\alpha\).
- \(g\) là gia tốc trọng trường.
- \(l\) là chiều dài dây treo con lắc.
- \(\alpha_0\) là góc ban đầu so với phương thẳng đứng khi con lắc bắt đầu dao động.
Ví Dụ Minh Họa
Giả sử một con lắc đơn có chiều dài dây \(l = 1 m\), được kéo với một góc \(\alpha_0 = 45^\circ\) và thả tự do. Khi con lắc đi qua vị trí có góc \(\alpha = 30^\circ\), vận tốc của nó được tính như sau:
\[
v = \sqrt{2 \cdot 9.8 \cdot 1 (\cos 30^\circ - \cos 45^\circ)} \approx 1.78 \, m/s
\]
Ứng Dụng Của Con Lắc Đơn
Con lắc đơn không chỉ là một bài toán cơ bản trong vật lý lý thuyết mà còn có nhiều ứng dụng thực tế:
- Đồng hồ quả lắc: Sử dụng dao động của con lắc để đo thời gian.
- Thí nghiệm đo gia tốc trọng trường: Xác định gia tốc trọng trường ở một khu vực nhất định bằng con lắc đơn.
- Minh họa nguyên lý dao động điều hòa trong các bài giảng và thí nghiệm vật lý.
Kết Luận
Con lắc đơn là một hệ thống đơn giản nhưng lại mang nhiều ý nghĩa trong cả lý thuyết và thực tiễn. Việc hiểu rõ công thức tính vận tốc của con lắc đơn giúp ích rất nhiều trong việc giải các bài toán vật lý và ứng dụng vào thực tế.
1. Giới thiệu về con lắc đơn
Con lắc đơn là một hệ thống cơ học đơn giản, thường được sử dụng để nghiên cứu các nguyên lý cơ bản của dao động và lực. Hệ thống này bao gồm một vật nhỏ có khối lượng \( m \), treo vào một sợi dây không giãn có chiều dài \( l \). Đầu trên của dây cố định, và khi vật được kéo ra khỏi vị trí cân bằng và thả nhẹ, nó sẽ dao động quanh vị trí này dưới tác dụng của trọng lực.
1.1 Định nghĩa và cấu tạo của con lắc đơn
- Định nghĩa: Con lắc đơn là một hệ thống gồm một vật có khối lượng nhỏ được treo vào một điểm cố định bằng một sợi dây không giãn và có chiều dài \( l \). Vật dao động xung quanh vị trí cân bằng dưới tác dụng của trọng lực.
- Cấu tạo: Con lắc đơn bao gồm các thành phần chính sau:
- Vật nặng: có khối lượng \( m \), thường là một quả cầu nhỏ.
- Dây treo: không giãn, có chiều dài \( l \).
- Điểm cố định: là điểm mà từ đó dây treo được gắn vào, cho phép vật dao động tự do.
1.2 Các khái niệm cơ bản: chu kỳ, tần số, và biên độ
Trong quá trình dao động, con lắc đơn có một số khái niệm cơ bản cần lưu ý:
- Chu kỳ (T): Là thời gian để con lắc thực hiện một dao động toàn phần. Chu kỳ được xác định bằng công thức: \[ T = 2\pi \sqrt{\frac{l}{g}} \] trong đó \( g \) là gia tốc trọng trường.
- Tần số (f): Là số lần dao động toàn phần mà con lắc thực hiện trong một đơn vị thời gian, và được tính bằng công thức: \[ f = \frac{1}{T} = \frac{1}{2\pi} \sqrt{\frac{g}{l}} \]
- Biên độ (A): Là góc lệch cực đại của dây treo so với phương thẳng đứng khi con lắc dao động. Biên độ thường được ký hiệu là \( \alpha_0 \).
Con lắc đơn được ứng dụng rộng rãi trong các thí nghiệm vật lý nhằm nghiên cứu tính chất của dao động điều hòa, cũng như trong các thiết bị đo thời gian như đồng hồ quả lắc.
2. Công thức tính vận tốc của con lắc đơn
Vận tốc của con lắc đơn có thể được xác định dựa trên vị trí của nó trong quá trình dao động. Cụ thể, có ba trường hợp thường gặp khi tính toán vận tốc:
2.1 Công thức khi vật qua vị trí cân bằng
Khi con lắc đơn dao động qua vị trí cân bằng, vận tốc đạt cực đại. Công thức tính vận tốc cực đại của con lắc đơn là:
\[
v_{max} = \sqrt{2gl(1 - \cos{\alpha_0})}
\]
trong đó:
- \(g\): Gia tốc trọng trường (m/s²)
- \(l\): Chiều dài của dây treo con lắc (m)
- \(\alpha_0\): Biên độ góc ban đầu của dao động (rad)
2.2 Công thức khi vật lệch góc \(\alpha\) bất kỳ
Đối với vị trí bất kỳ khi con lắc lệch một góc \(\alpha\) so với vị trí cân bằng, vận tốc của con lắc được tính bằng công thức:
\[
v = \sqrt{2gl(\cos{\alpha} - \cos{\alpha_0})}
\]
2.3 Công thức vận tốc tại các vị trí đặc biệt
Vận tốc của con lắc đơn cũng có thể được xác định tại các vị trí đặc biệt khác, chẳng hạn khi con lắc đạt đến biên (vận tốc bằng 0) hoặc khi nó đạt giá trị tối đa tại vị trí cân bằng.
2.4 Ứng dụng và bài tập liên quan
Các công thức trên được áp dụng rộng rãi trong các bài tập liên quan đến chuyển động dao động của con lắc đơn, giúp giải quyết các bài toán tính toán vận tốc và lực căng dây ở nhiều vị trí khác nhau.

3. Công thức tính lực căng dây con lắc đơn
Lực căng dây trong dao động của con lắc đơn là một yếu tố quan trọng, ảnh hưởng trực tiếp đến chuyển động của vật. Để tính toán lực căng dây, ta có thể xét lực căng tại các vị trí đặc biệt như vị trí cân bằng, vị trí biên, và bất kỳ vị trí nào trong quá trình dao động.
3.1 Công thức tổng quát
Lực căng dây tại một vị trí bất kỳ trong dao động được tính theo công thức:
\[
T = mg(3\cos\alpha - 2\cos\alpha_0)
\]
Trong đó:
- \(T\) là lực căng dây.
- \(m\) là khối lượng của vật.
- \(g\) là gia tốc trọng trường.
- \(\alpha\) là góc lệch tại vị trí bất kỳ.
- \(\alpha_0\) là góc lệch cực đại (biên độ góc).
3.2 Công thức lực căng dây lớn nhất
Lực căng dây lớn nhất xảy ra khi con lắc qua vị trí cân bằng (\(\alpha = 0\)), và được tính theo công thức:
\[
T_{\text{max}} = mg(3 - 2\cos\alpha_0)
\]
3.3 Công thức lực căng dây nhỏ nhất
Lực căng dây nhỏ nhất xảy ra tại vị trí biên (\(\alpha = \alpha_0\)) và được tính như sau:
\[
T_{\text{min}} = mg\cos\alpha_0
\]
Việc hiểu rõ các công thức này giúp bạn giải quyết các bài toán về con lắc đơn một cách hiệu quả hơn, đặc biệt trong việc xác định điều kiện dao động và tính toán lực tác động lên vật.

4. Phương trình dao động của con lắc đơn
Để phân tích dao động của con lắc đơn, chúng ta có thể sử dụng phương trình dao động dựa trên các đặc tính vật lý của hệ thống. Con lắc đơn có thể dao động điều hòa dưới điều kiện góc lệch cực đại \( \alpha_0 \) phải nhỏ, thường là \( \alpha_0 \leq 10^\circ \).
Phương trình dao động của con lắc đơn được biểu diễn dưới hai dạng chính: li độ tuyến tính \( s \) và li độ góc \( \alpha \).
-
Phương trình dao động theo li độ tuyến tính:
\[ s = s_0 \cos(\omega t + \phi) \]Trong đó:
- \( s \): Li độ của con lắc đơn tại thời điểm \( t \).
- \( s_0 \): Biên độ dao động (li độ cực đại).
- \( \omega \): Tần số góc của dao động, được tính bởi công thức \( \omega = \sqrt{\frac{g}{l}} \).
- \( \phi \): Pha ban đầu của dao động.
-
Phương trình dao động theo li độ góc:
\[ \alpha = \alpha_0 \cos(\omega t + \phi) \]Trong đó:
- \( \alpha \): Li độ góc của con lắc đơn tại thời điểm \( t \).
- \( \alpha_0 \): Biên độ góc (góc lệch cực đại).
- \( \omega \): Tần số góc của dao động.
- \( \phi \): Pha ban đầu của dao động.
Những phương trình này cung cấp cái nhìn tổng quát về cách con lắc đơn di chuyển theo thời gian, từ đó giúp chúng ta tính toán và dự đoán các đặc điểm khác của dao động như vận tốc, gia tốc và năng lượng của hệ thống.

5. Các dạng bài tập con lắc đơn thường gặp
Các dạng bài tập liên quan đến con lắc đơn thường xoay quanh nhiều khía cạnh khác nhau của dao động điều hòa. Dưới đây là một số dạng bài tập phổ biến mà học sinh thường gặp khi học về con lắc đơn:
- Dạng 1: Tính chu kỳ và tần số
Bài tập yêu cầu xác định chu kỳ \(T\) và tần số \(f\) của con lắc dựa trên các yếu tố như chiều dài dây treo và gia tốc trọng trường. Công thức cơ bản là:
\[ T = 2\pi \sqrt{\frac{l}{g}} \]trong đó \(l\) là chiều dài dây treo và \(g\) là gia tốc trọng trường.
- Dạng 2: Tính vận tốc và lực căng dây
Loại bài tập này thường yêu cầu tính vận tốc tại một vị trí bất kỳ hoặc lực căng dây tại điểm thấp nhất của con lắc. Công thức tính vận tốc khi vật qua vị trí cân bằng là:
\[ v = \sqrt{2gl(1 - \cos\theta)} \]Trong đó, \(v\) là vận tốc, \(l\) là chiều dài dây treo, và \(\theta\) là góc lệch.
- Dạng 3: Tính năng lượng dao động
Bài tập dạng này yêu cầu tính tổng năng lượng, năng lượng động và năng lượng thế tại các vị trí khác nhau trong quá trình dao động của con lắc đơn. Các công thức liên quan bao gồm:
- Năng lượng toàn phần: \(E = \frac{1}{2}mgl\theta^2\)
- Năng lượng thế: \(E_t = mgl(1 - \cos\theta)\)
- Năng lượng động: \(E_d = \frac{1}{2}mv^2\)
Bằng cách thực hành với các dạng bài tập trên, học sinh sẽ nắm vững kiến thức về con lắc đơn, từ đó dễ dàng giải quyết các bài toán phức tạp hơn trong lĩnh vực vật lý dao động.
XEM THÊM:
6. Tổng kết và các lưu ý khi học về con lắc đơn
Khi học về con lắc đơn, có một số điểm quan trọng cần ghi nhớ để tránh sai sót và hiểu rõ hơn về các công thức và nguyên lý liên quan.
- Hiểu rõ nguyên lý: Hãy nắm vững nguyên lý dao động điều hòa của con lắc đơn, bao gồm sự liên quan giữa chu kỳ, tần số, và các yếu tố ảnh hưởng như chiều dài dây và gia tốc trọng trường.
- Áp dụng đúng công thức: Khi sử dụng các công thức tính vận tốc, lực căng dây, và chu kỳ, cần chú ý đến điều kiện áp dụng như biên độ góc nhỏ và không được bỏ qua các biến quan trọng.
- Thực hành thường xuyên: Để làm chủ các công thức và kỹ năng giải bài tập, học sinh cần thực hành nhiều dạng bài khác nhau, từ cơ bản đến nâng cao, và đảm bảo hiểu rõ mỗi bước giải.
- Lưu ý đến sai số: Trong quá trình thực hiện thí nghiệm hoặc tính toán, cần chú ý đến các sai số có thể xảy ra và tìm cách giảm thiểu chúng để kết quả chính xác hơn.
- Điều kiện thực nghiệm: Khi tiến hành thí nghiệm đo chu kỳ hoặc vận tốc, hãy đảm bảo rằng con lắc dao động với biên độ nhỏ và môi trường không có ảnh hưởng từ các yếu tố bên ngoài như gió hay lực cản.
Những lưu ý trên không chỉ giúp bạn nắm vững kiến thức lý thuyết mà còn nâng cao kỹ năng thực hành và khả năng giải quyết các bài toán về con lắc đơn một cách hiệu quả.